

Typical lane changing track determination method and device based on lane changing scene data and computer storage medium
A technology for scene data and determination methods, applied in computer parts, calculations, instruments, etc., can solve the problems of low extraction rate of common features of trajectories, loss of landing application of lane-changing trajectories, etc., to improve scientific rationality and high reliability. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
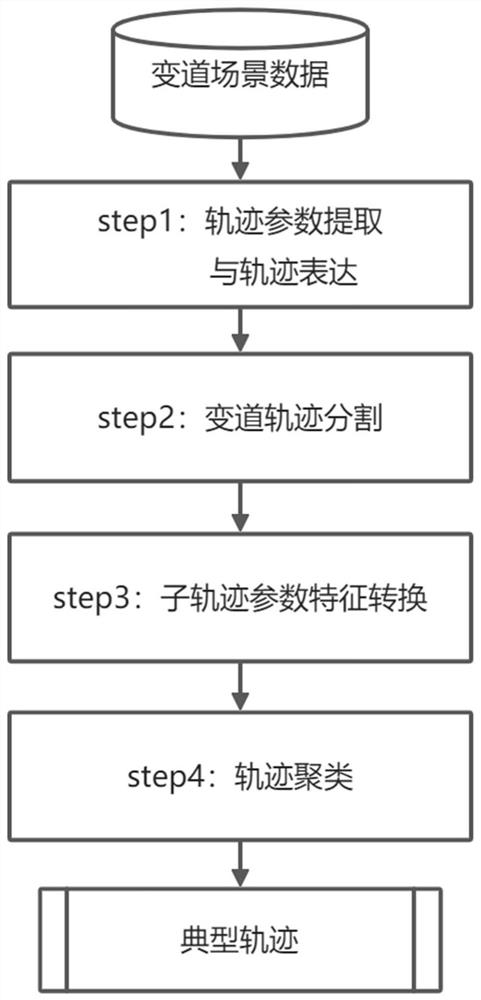
[0147] Embodiment 1. See figure 1 Illustrating this embodiment, a method for determining a typical lane change trajectory based on lane change scene data described in this embodiment includes the following steps:
[0148] The steps of trajectory parameter extraction and trajectory expression: extracting parameters representing the lane-changing trajectory based on the lane-changing scene data collected by the autonomous driving vehicle, and obtaining the trajectory expression based on the parameters;
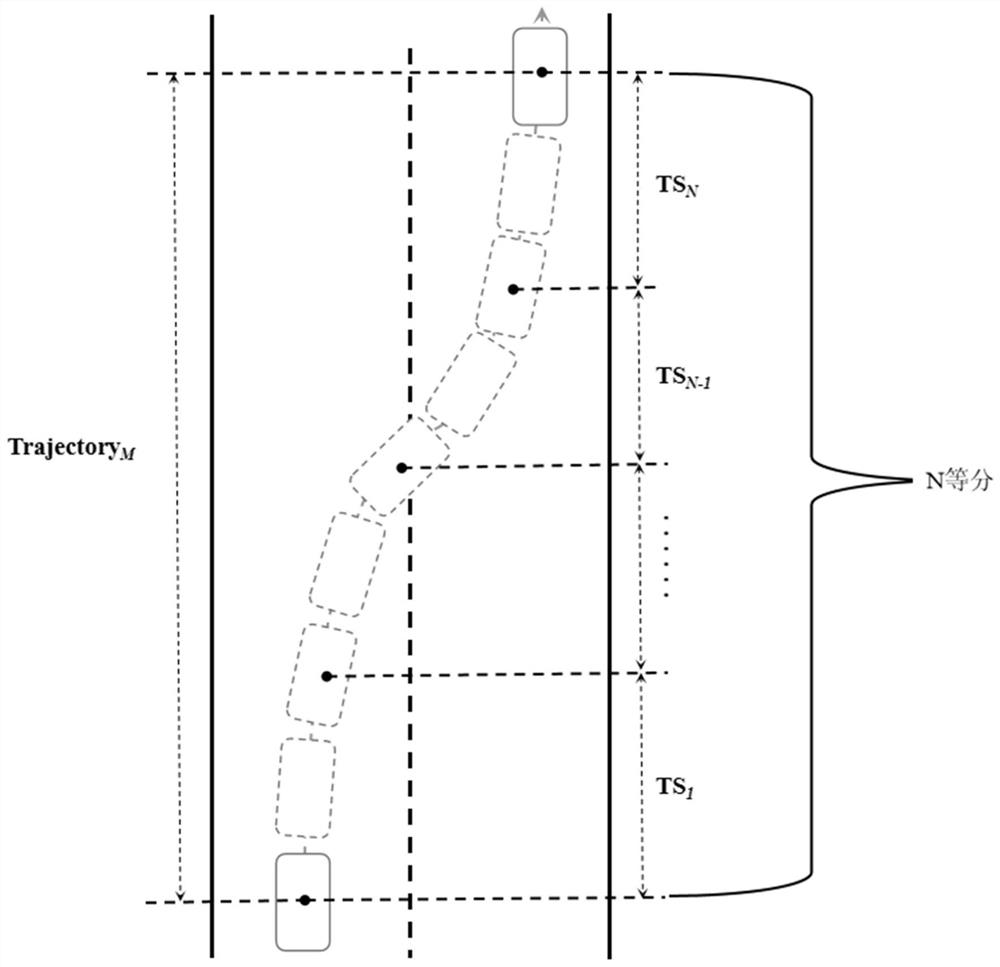
[0149] Lane change track segmentation step: divide each lane change track into N segments of N equal segments, and each segment is a sub-track;
[0150] Sub-track parameter feature conversion step: extract track parameters from each sub-track, and perform feature conversion on the track parameters to obtain the parameter features of the n-th sub-track in the m-th track:
[0151] TS' mn =[Angel' mn , Speed' mn , Position_X' mn , Position_Y m ' n ],
[0152] Among them, An...
Embodiment approach 2
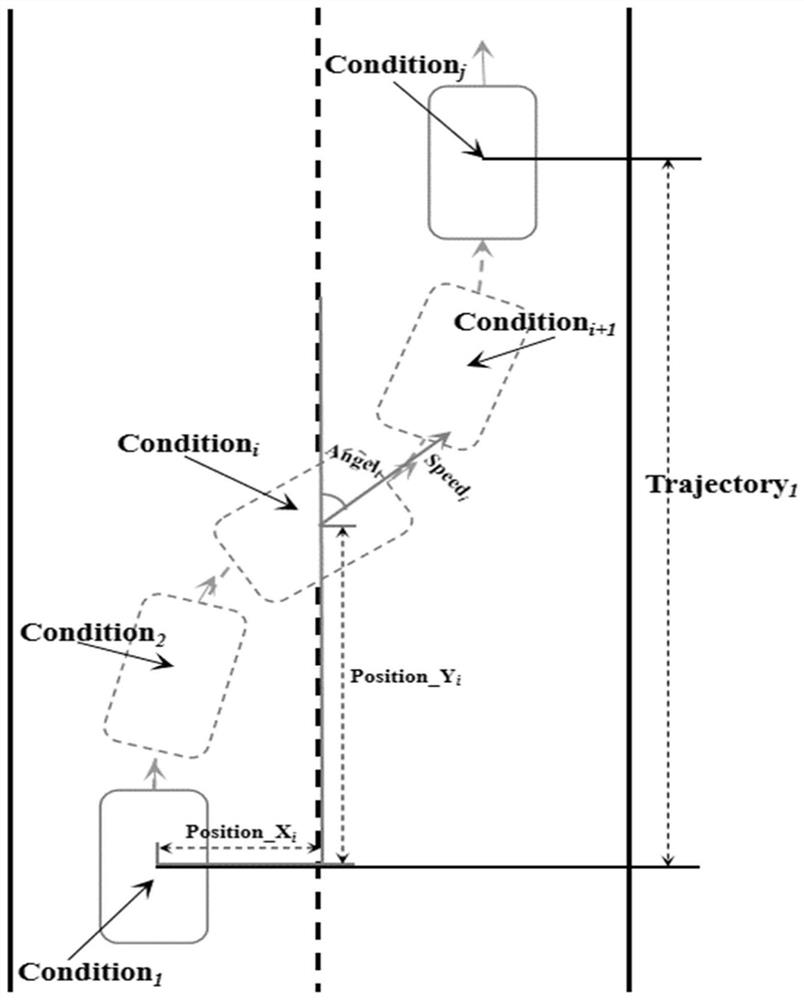
[0156] Embodiment 2. This embodiment is a further limitation of the method for determining a typical lane-change trajectory based on lane-change scene data described in Embodiment 1. In this embodiment, the parameters representing the lane-change trajectory include: steering wheel angle Angle; , vehicle speed Speed, vehicle longitudinal position Position_X, vehicle lateral position Position_Y four parameters.
[0157] This embodiment explains the lane change trajectory parameters. The lane change trajectory parameters in this embodiment take into account four parameters, see figure 2 where: the longitudinal position of the vehicle refers to the displacement of the current position of the vehicle along the lane relative to the starting time of the lane change, and the lateral position of the vehicle refers to the displacement of the current position of the vehicle perpendicular to the direction of the lane relative to the starting time of the lane change.
Embodiment approach 3
[0158] Embodiment 3. This embodiment is a further limitation of the method for determining a typical lane change trajectory based on lane change scene data described in Embodiment 1. In this embodiment, the expression based on the trajectory is: TD={TR1 , TR2, ..., TRM}, M is the total amount of all lane-change track data, TR1 represents the first lane-change track, TR2 represents the second lane-change track, ..., TRM represents The M-th lane change trajectory.
[0159] In this embodiment, the lane change trajectory is expressed as:
[0160] Trajectory = [Cond1, Cond2, ..., Condj],
[0161] Among them, j represents the end time of the lane change trajectory, and Condi represents the trajectory feature at time i
[0162] Condi=,
[0163] Where Anglei represents the steering wheel angle at time i, Speedi represents the vehicle speed at time i, Position_Xi represents the lateral position of the vehicle at time i, and Position_Yi represents the longitudinal position of the veh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More