

Spacecraft tracking control method based on integrated linear operator and anti-saturation technology
A linear operator and tracking control technology, which is applied in the direction of aerospace vehicles, aerospace vehicle guidance devices, aircraft, etc., can solve the problem of low performance of spacecraft attitude track tracking maneuver control, to eliminate adverse effects, ensure stability, The effect of improving trajectory tracking accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
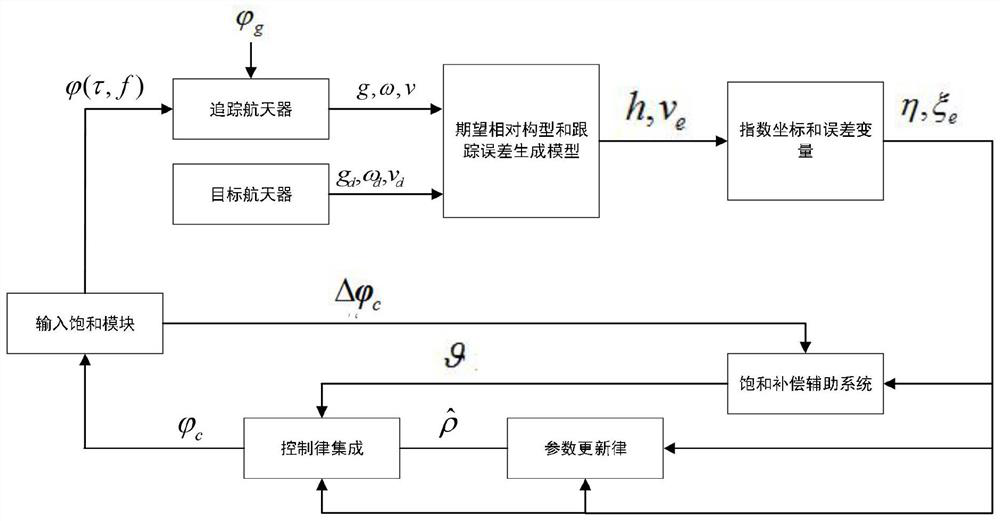
[0026] Embodiment 1: The specific process of the spacecraft tracking control method based on the integrated linear operator and anti-saturation technology in this embodiment is as follows:
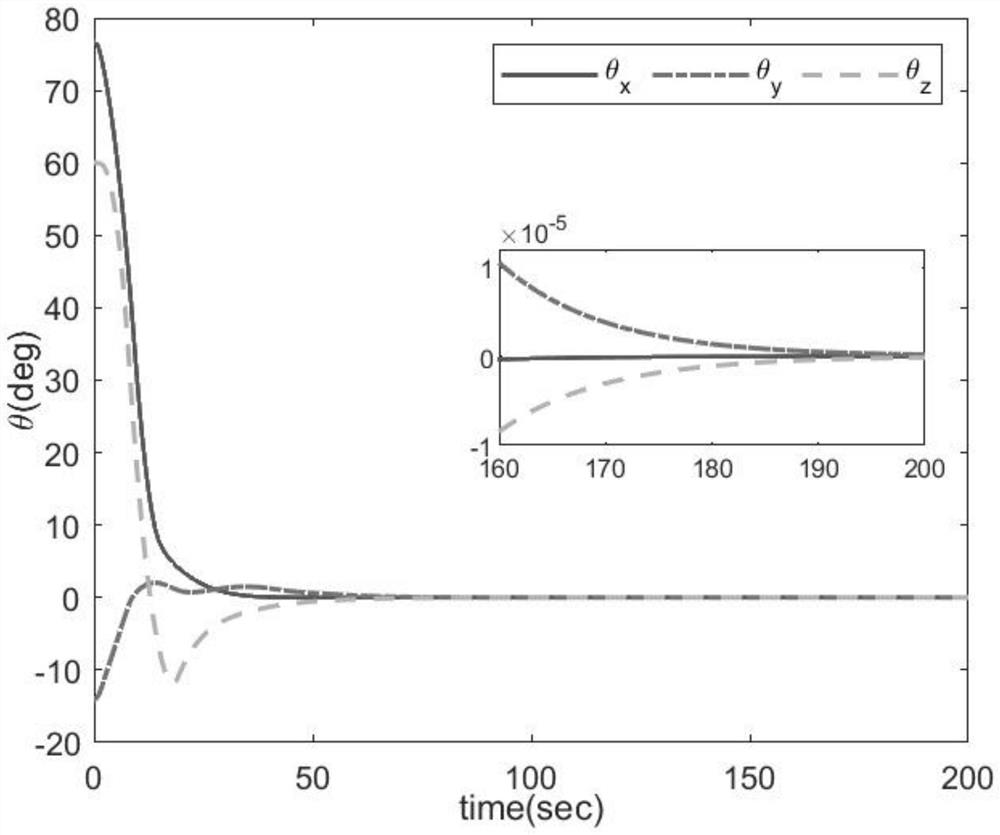
[0027] Step 1: Measure and obtain the attitude and orbit state of the target spacecraft and the attitude and orbit state of the tracking spacecraft, and determine the relative pose and attitude configuration between the target spacecraft and the tracking spacecraft based on the attitude and orbit state of the target spacecraft and the attitude and orbit state of the tracking spacecraft. Obtain the position and attitude tracking error of the tracking spacecraft from the relative pose configuration between the target spacecraft and the tracking spacecraft;
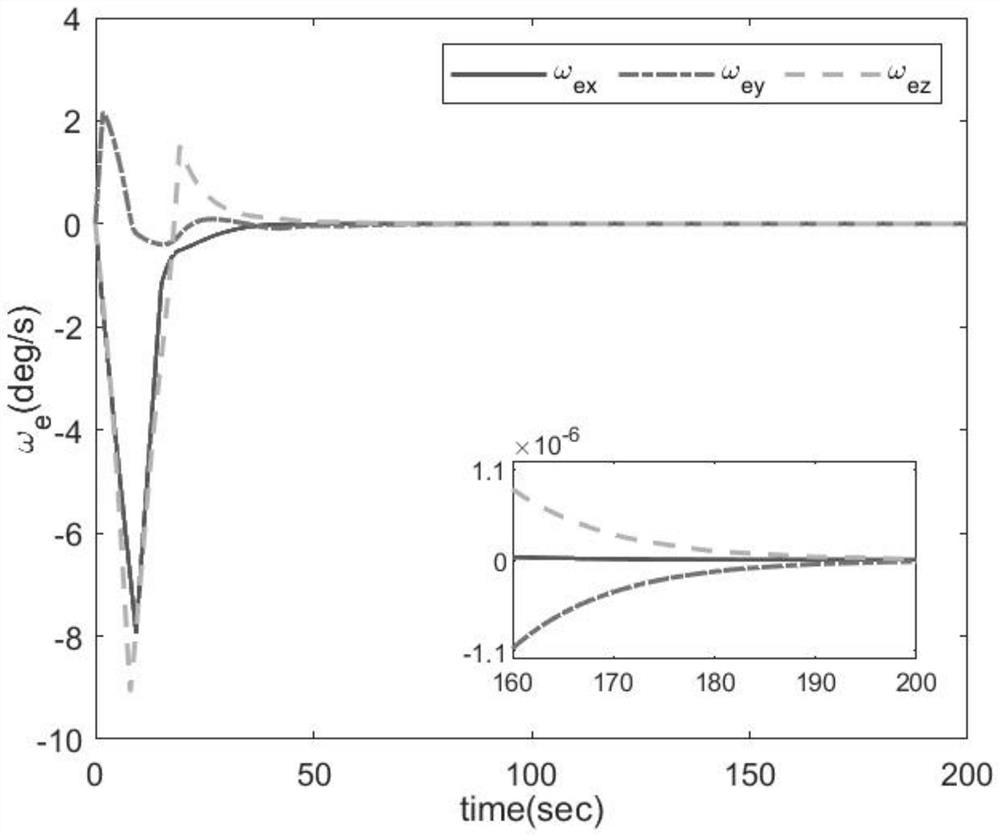
[0028] Step 2: Determine the velocity tracking error in the body coordinate system of the tracking spacecraft based on the relative pose configuration between the target spacecraft and the tracking spacecraft;
[0029] Step 3: Based on S...
specific Embodiment approach 2
[0034] Embodiment 2: The difference between this embodiment and Embodiment 1 is that in step 1, the attitude and orbit status of the target spacecraft and the attitude and orbit status of the tracking spacecraft are measured and obtained, and the attitude and orbit status of the target spacecraft and the attitude and orbit status of the tracking spacecraft are obtained based on the attitude and orbit status of the target spacecraft. The orbit state determines the relative pose configuration between the target spacecraft and the tracking spacecraft, and obtains the tracking spacecraft pose tracking error based on the relative pose configuration between the target spacecraft and the tracking spacecraft; the specific process is as follows:
[0035] Measure and obtain the attitude and orbit state of the target spacecraft and tracking spacecraft attitude and orbit status Determine the relative pose configuration between the target spacecraft and the tracking spacecraft Obtain t...
specific Embodiment approach 3
[0040] Embodiment 3: The difference between this embodiment and Embodiment 1 or 2 is that the exponential coordinate vector β for tracking the position tracking error of the spacecraft is expressed as:
[0041] β=S -1 (θ)x
[0042]
[0043]
[0044] Among them, I 3 is a 3-dimensional identity matrix, and S(θ) is an intermediate matrix.
[0045] Other steps and parameters are the same as in the first or second embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More