Octree map construction method based on closed-loop trajectory
A map construction and closed-loop technology, applied in image analysis, image enhancement, 3D modeling, etc., can solve the problems of uneven map reference plane, difficulty in ensuring the real-time performance of the algorithm, and inconsistency between the angle and the actual situation, so as to reduce the pose estimation error, Improve the accuracy of mapping and improve the effect of accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0051] The present invention will be further described below with reference to the accompanying drawings and embodiments.
[0052] The method for constructing an octree map based on a closed-loop trajectory in this embodiment includes the steps:
[0053] 1) Extract the ORB feature points in the image, match the feature points according to the ORB feature points extracted from the adjacent two frames of images, perform pose estimation and optimization according to the matched ORB feature points, and determine whether to generate a key frame.
[0054] 2) Generate map points according to newly added key frames. In this step, ORBSLAM is used to process key frame images to establish map points.
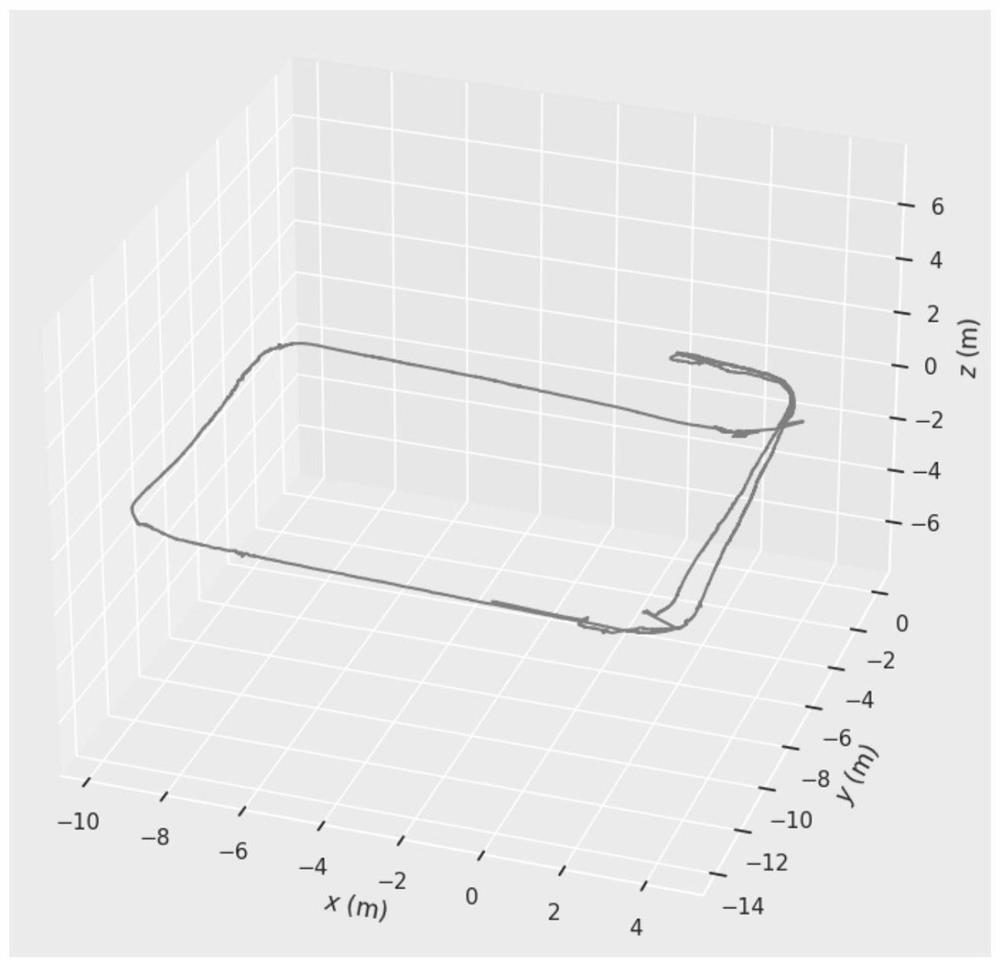
[0055] 3) Perform closed-loop detection and closed-loop correction, and optimize step 1) and step 2) to generate a closed-loop trajectory according to the pose and map points generated by the ORB feature points;
[0056] A closed loop trajectory such asfigure 1 shown, as figure 2 The s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



