

Slave end driving device and method of interventional surgical robot
A technology for interventional surgery and driving devices, applied in the field of medical devices, can solve problems such as difficult control of sterile isolation, inability to expand platform functions, and inconvenient installation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The technical solutions in the embodiments of the present invention will be clearly and completely described below with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only a part of the embodiments of the present invention, rather than all the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative efforts shall fall within the protection scope of the present invention.
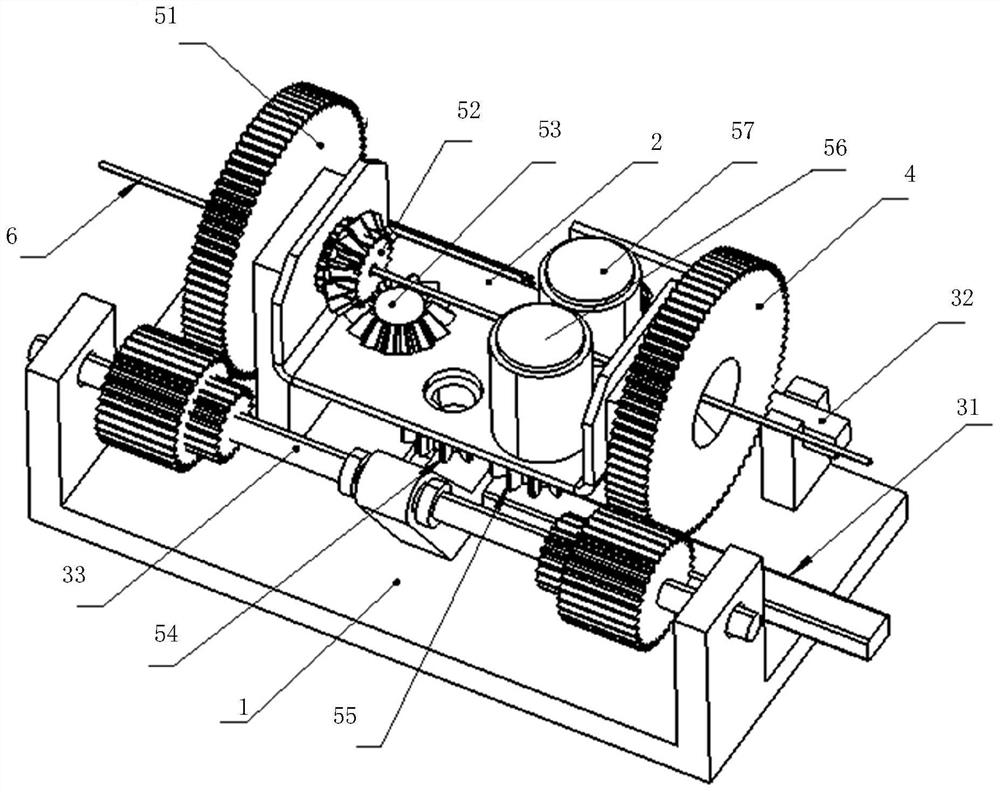
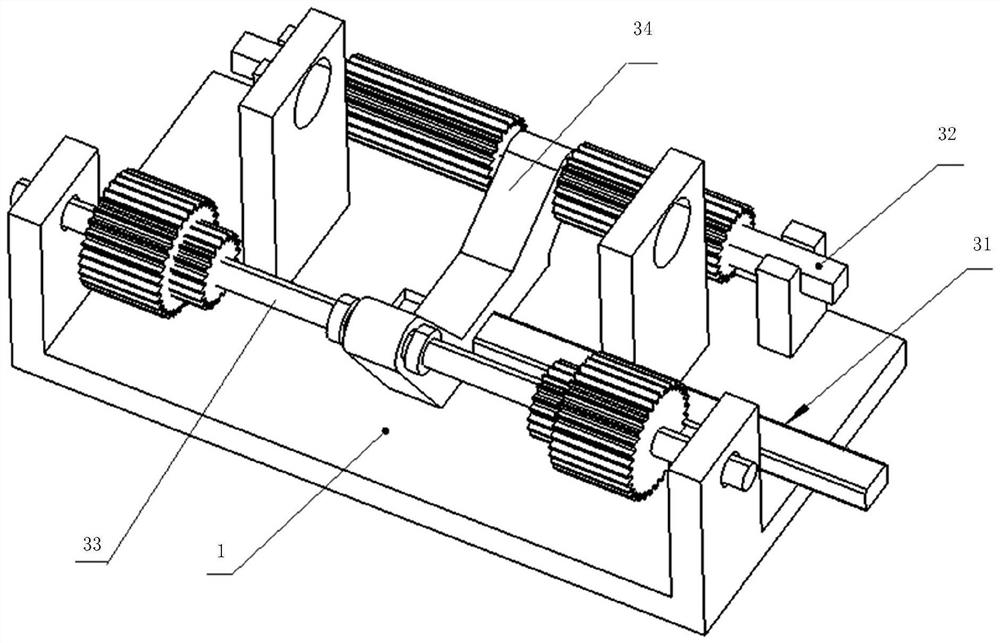
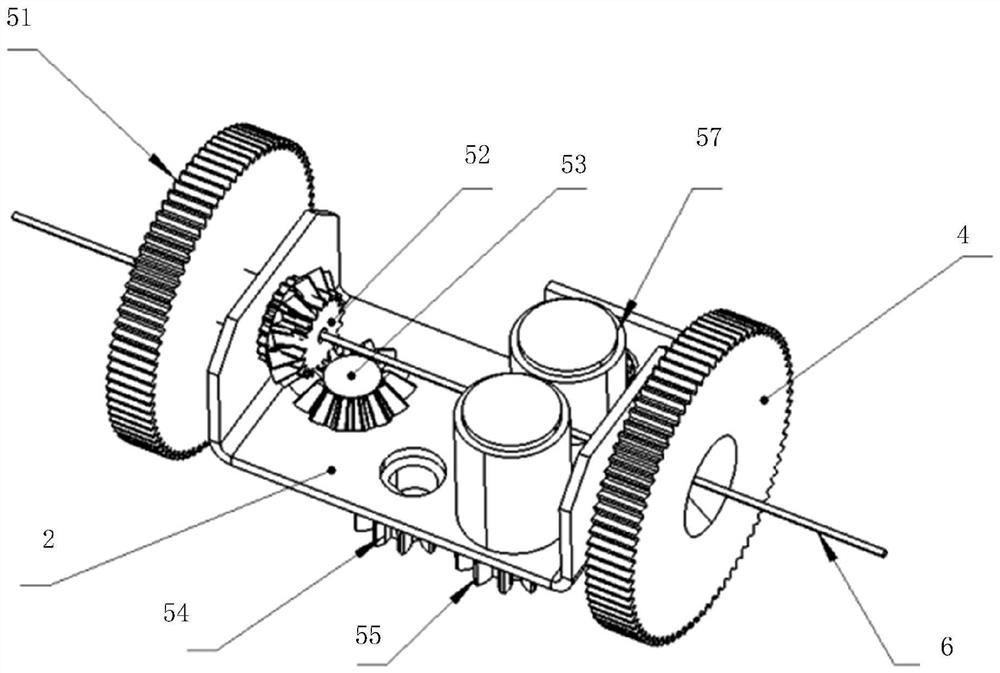
[0030] The embodiment of the present invention discloses a slave-end driving device of an interventional surgical robot. Through the integrated design, the linear motion and the rotational motion of the long and straight consumables are integrated, and the differential speed control and compensation mechanism of the motor effectively solves the problem of existing problems. The linear motion and rotational motion of the technology are...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More