Emergency collision avoidance control method and system for intelligent driving vehicle
A technology of intelligent driving and control method, applied in the field of intelligent driving control, can solve the problems of complex arbitration mechanism and lack of arbitration mechanism, and achieve the effect of avoiding the danger of vehicle driving and saving computing resources
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
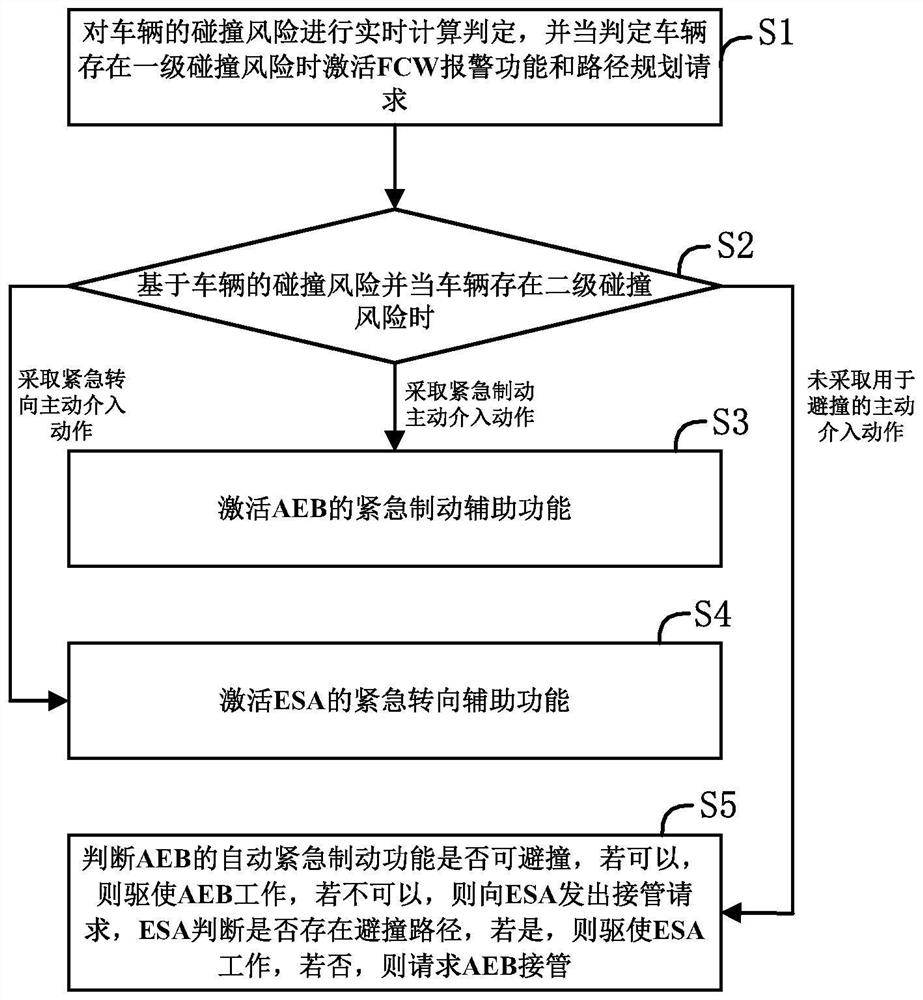
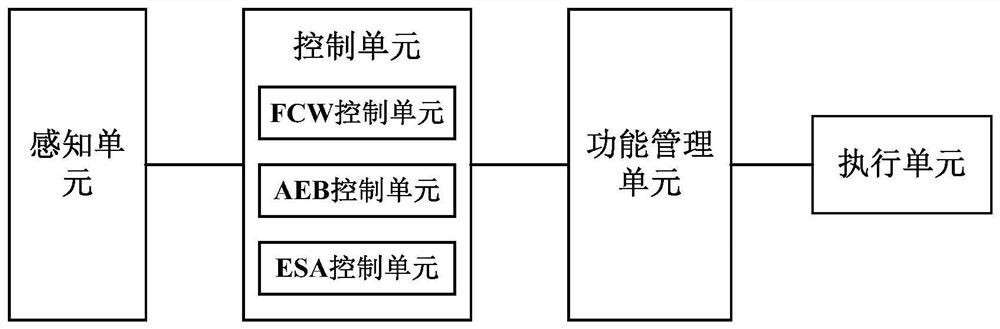
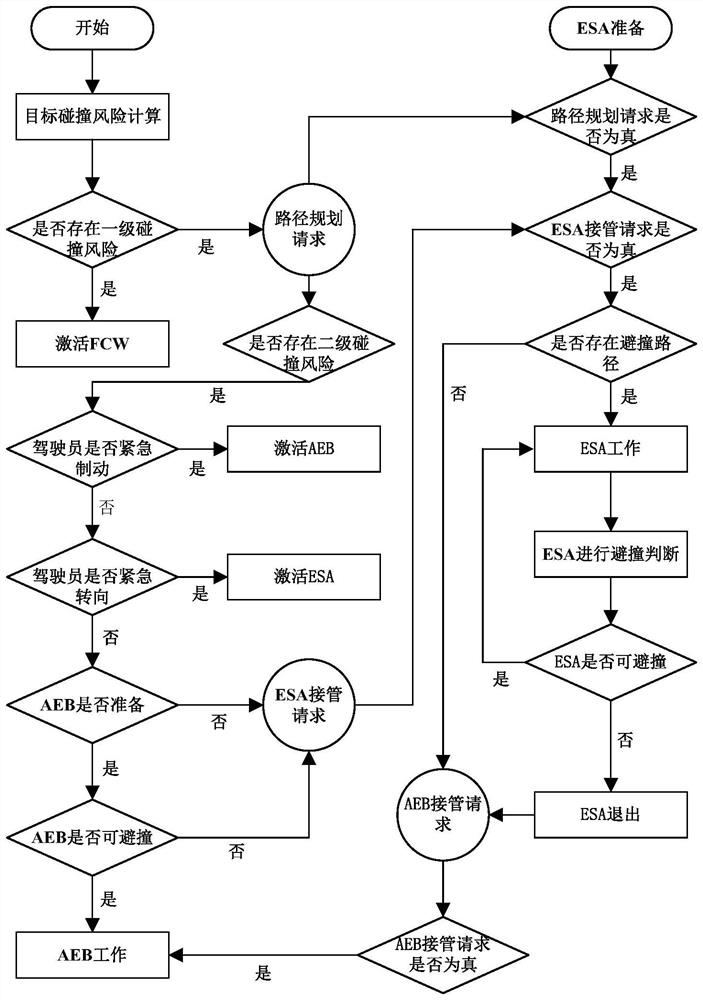
[0044] The embodiment of the present invention provides an emergency collision avoidance control method for an intelligent driving vehicle. During the emergency collision avoidance control process of the intelligent driving vehicle, for the execution of the FCW, AEB and ESA functions, through the setting of multiple preconditions, the functions between the functional units are set. Work in cooperation with each other, and high-priority functional units are executed first. When high-priority functional units cannot avoid collisions, they will notify low-priority units to execute. While ensuring the orderly operation of the intelligent driving function, it saves algorithm computing resources. And the low-priority functional unit can also feed back the execution status to the high-priority functional unit, ensuring that there must be measures to mitigate or avoid the danger of vehicle driving. Accordingly, the embodiment of the present invention also provides an emergency collisio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com