Robot obstacle avoidance method and device, robot and computer readable storage medium
A robot and fuselage technology, applied in the field of robots, can solve problems such as the inability of robots to exit, and achieve the effect of avoiding being trapped and improving cleaning efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0044] Embodiments of the present disclosure provide an obstacle avoidance method for a robot.
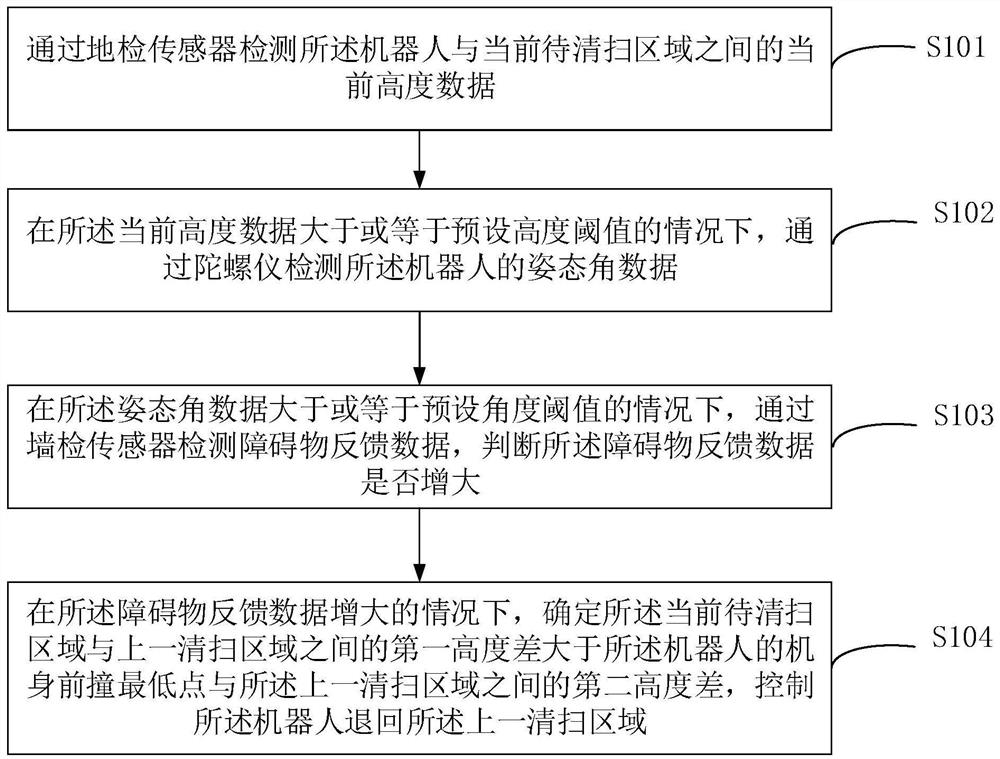
[0045] Specifically, see figure 1 , the robot obstacle avoidance methods include:
[0046] In step S101, the current height data between the robot and the current area to be cleaned is detected by the ground detection sensor.
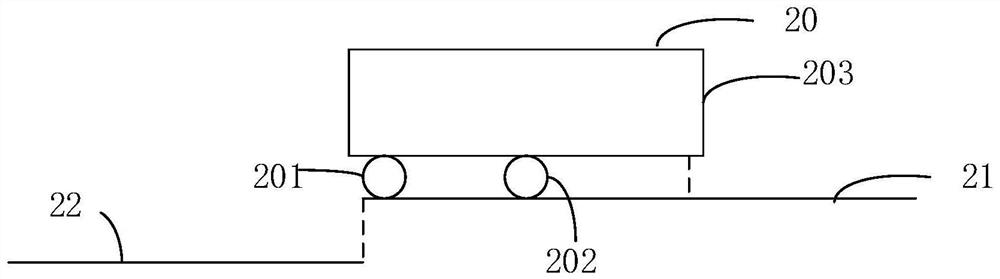
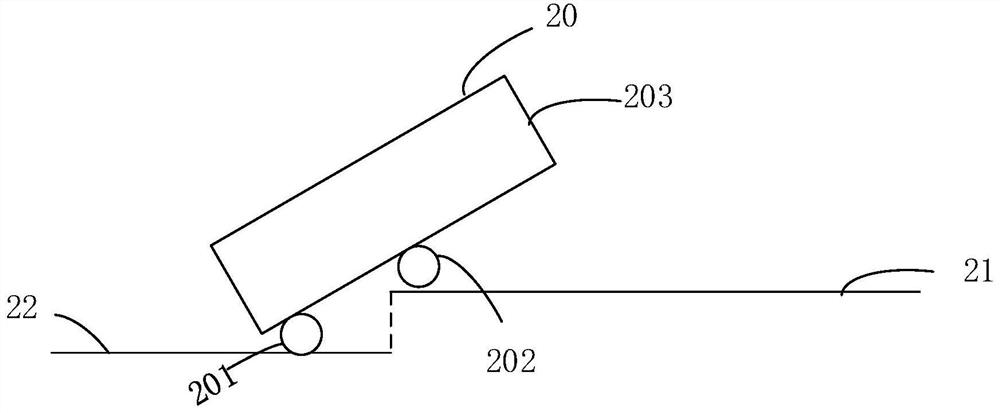
[0047] see figure 2 , figure 2 Shown is a schematic diagram of a motion state of the robot. like figure 2 As shown, the robot 20 includes a front wheel 201, a driving wheel 202 and a fuselage 203. The robot 20 cleans the first ground area 21, and the robot 20 moves to the first ground area 21 and the second ground area 22 during the cleaning process. At the boundary, the nose of the robot 20 enters the second ground area 22 , and most of the fuselage is still on the first ground area 21 . It is added that the traction force of the driving wheel 202 is improved by the power mechanism of the robot, so that the robot can move forward, and the front whe...
Embodiment 2
[0102] In addition, embodiments of the present disclosure provide a robot obstacle avoidance device.
[0103] Specifically, as Figure 5 As shown, the robot obstacle avoidance device 500 includes:
[0104] The first detection module 501 is used for detecting the current height data between the robot and the current area to be cleaned through the ground detection sensor;
[0105] A second detection module 502, configured to detect the attitude angle data of the robot through a gyroscope when the current height data is greater than or equal to a preset height threshold;
[0106] The judgment module 503 is configured to detect the obstacle feedback data through the wall detection sensor when the attitude angle data is greater than or equal to the preset angle threshold, and judge whether the obstacle feedback data increases;
[0107] The control module 504 is used to determine that the first height difference between the current area to be cleaned and the previous cleaning area...
Embodiment 3
[0125] An embodiment of the present disclosure further provides a robot, including a memory and a processor, where the memory stores a computer program, and the computer program executes the robot obstacle avoidance method provided in Embodiment 1 when the processor runs.
[0126] The robot provided in this embodiment can implement the robot obstacle avoidance method provided in Embodiment 1, and to avoid repetition, details are not repeated here.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com