

Mobile robot path planning method based on improved ant colony algorithm and Bezier curve
A Bezier curve and mobile robot technology, applied in the direction of two-dimensional position/channel control, etc., can solve problems that are not suitable for real-time applications, consume preprocessing time, and unfavorable robot operation, so as to strengthen guidance and improve convergence The effect of high speed and safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The technical solutions in the embodiments of the present invention will be clearly and completely described below with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only a part of the embodiments of the present invention, but not all of the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative efforts shall fall within the protection scope of the present invention.
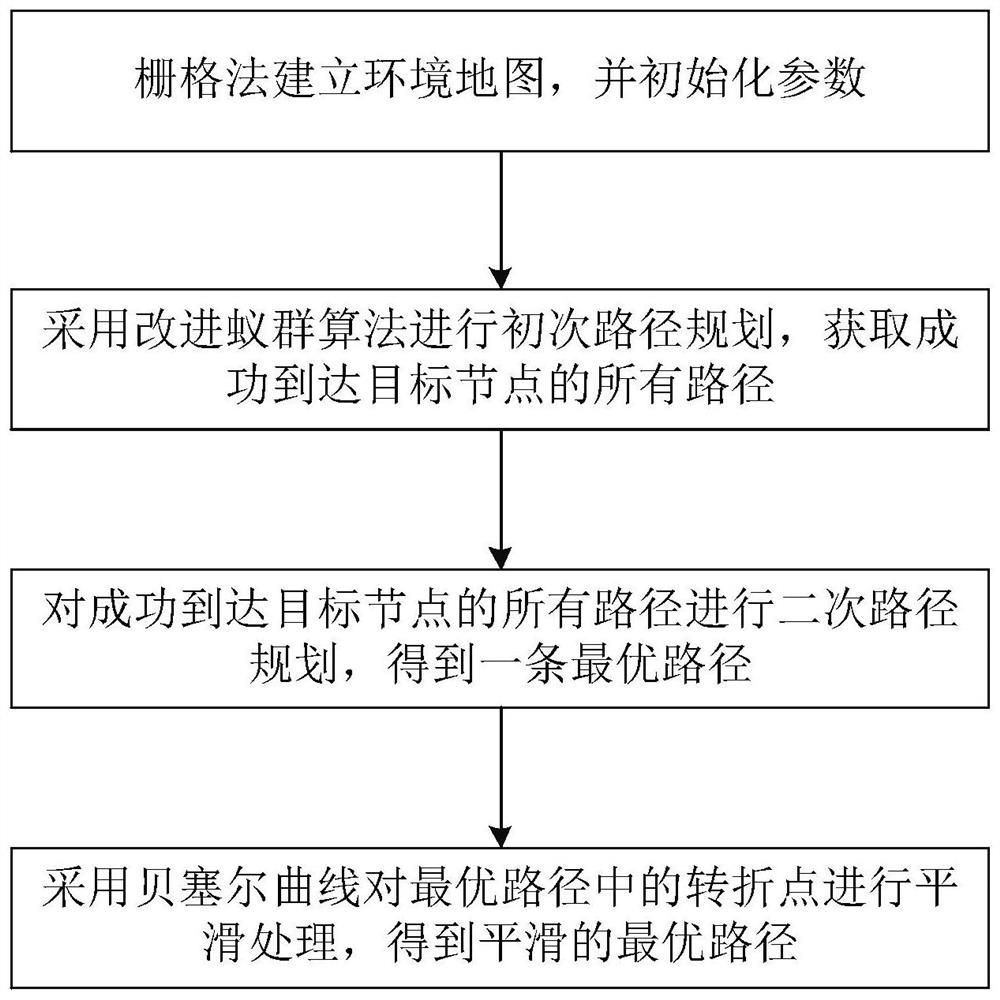
[0055] The invention provides a mobile robot path planning method based on improved ant colony algorithm and Bezier curve, such as figure 1 shown, including:
[0056] S1. The grid method establishes the environment map and initializes the parameters;
[0057] S2. Use the improved ant colony algorithm for initial path planning, and obtain all paths that successfully reach the target node;
[0058] S3. Perform secondary path planning ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More