

Method and device for determining road occupation information
A technology for lanes and construction areas, applied in the field of computer vision, can solve problems such as the difficulty of accurately giving construction markers in rectangular annotation frames and inaccurate assessment of road occupation in construction areas, so as to improve algorithm efficiency, reduce detection range, and improve efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] The technical solutions in the present application will be described below with reference to the accompanying drawings.
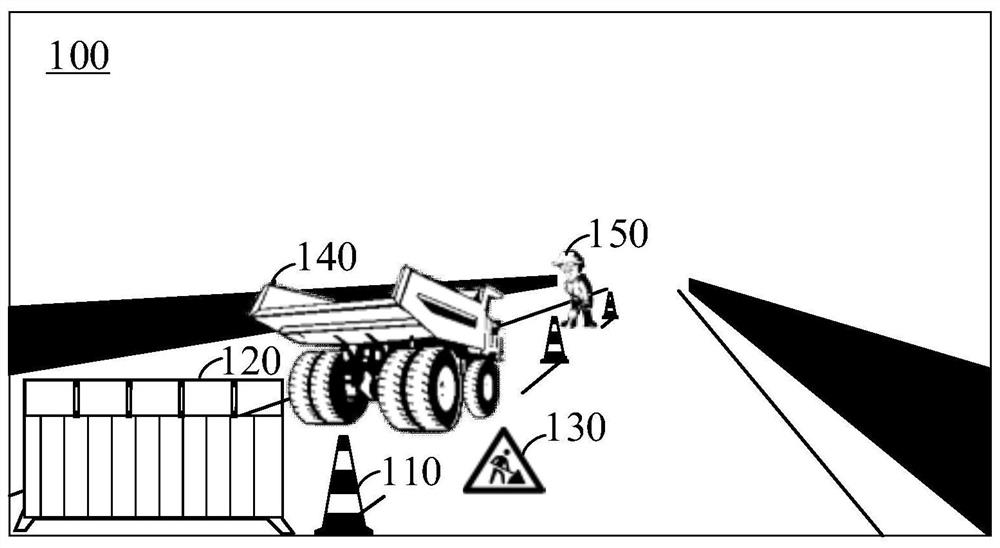
[0061] figure 1 It is a schematic diagram of a road construction area applicable to the embodiments of the present application. figure 1 It may be a front image 100 captured by a camera on the vehicle.
[0062] The image 100 includes a road construction area consisting of various landmarks such as traffic cones 110 , road barriers 120 , warning signs 130 , construction vehicles 140 and / or construction personnel 150 . Although the above road construction area markers can be classified as obstacles, the construction area has higher-level semantic information, so millimeter-wave radar (Radar) often does not have the ability to perceive complex construction areas. The sensors used in the current road construction area detection solutions include Lidar and Camera. Among them, the camera has the advantages of low cost, small size, easy deployment and eas...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More