

Autonomous obstacle-avoiding land-air amphibious device and control method thereof
An obstacle-land-air, controller technology, applied in three-dimensional position/channel control, two-dimensional position/channel control, etc., can solve the problem of multi-modal maneuver obstacle avoidance that cannot be automatically switched between land and air modes, and improve driving safety. performance, improve mobility, and reduce computational complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
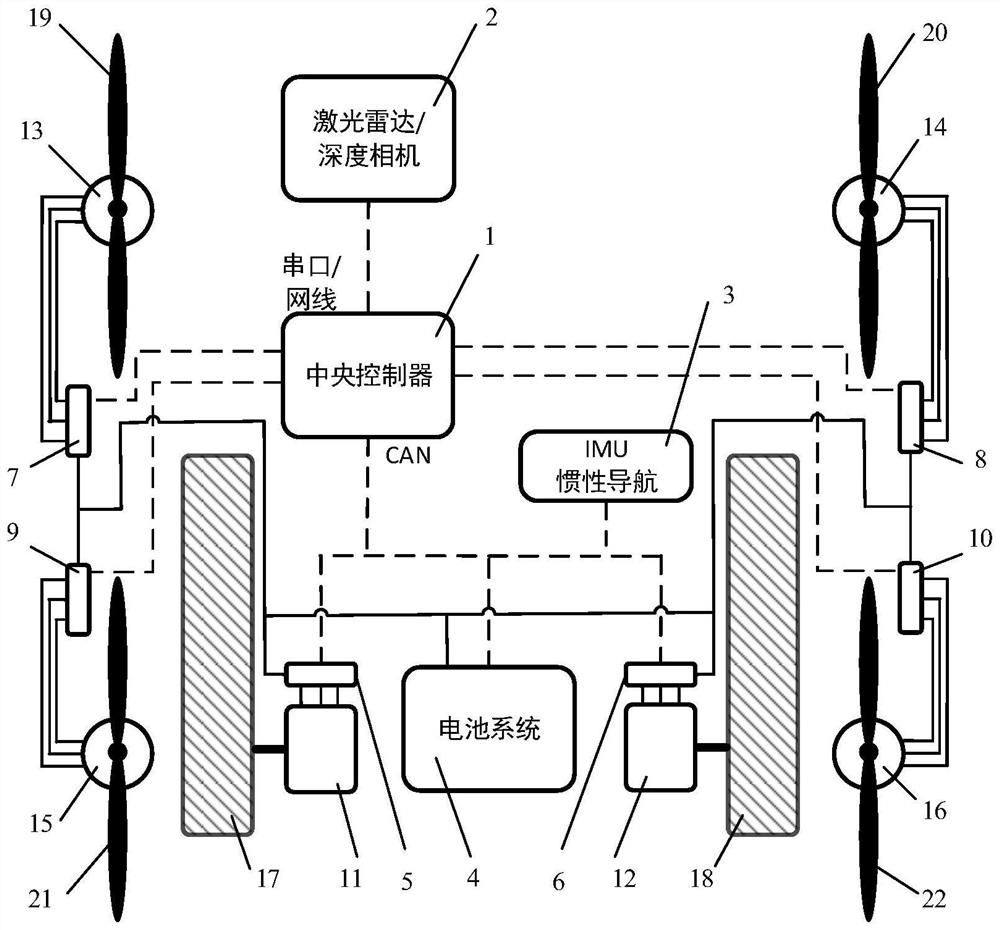
[0048] see figure 1 , the present invention provides an embodiment of an autonomous obstacle avoidance land and air amphibious device, which includes a central controller, a radar or a camera, an inertial navigation system, two drive motors, two drive motor controllers, two sets of crawlers, four Rotor motors, four rotor motor controllers, four rotors, battery system.
[0049] The two drive motors include: left drive motor, right drive motor;
[0050] The two drive motor controllers include: left drive motor controller, right drive motor controller;
[0051] Two sets of tracks include: left track, right track;
[0052] The four rotor motors include: left front rotor motor, right front rotor motor, left rear rotor motor, and right rear rotor motor;
[0053] The four rotor motor controllers include: left front rotor motor controller, right front rotor motor controller, left rear rotor motor controller, and right rear rotor motor controller;
[0054] Four rotors include: left...
Embodiment 2
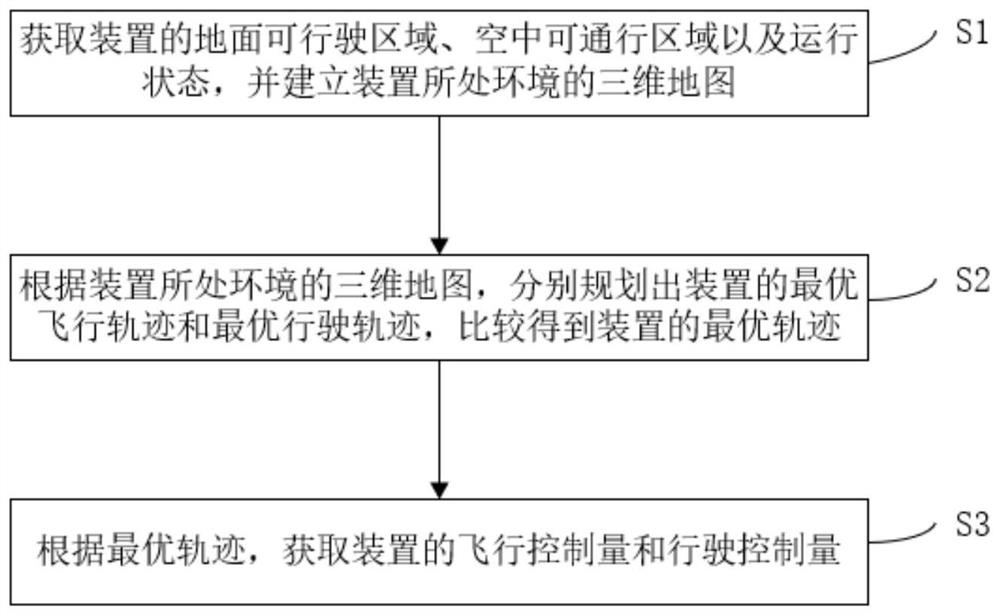
[0083] see image 3 , the present invention also provides an embodiment of a control method for an autonomous obstacle avoidance land-air amphibious device, the method comprising the following steps:
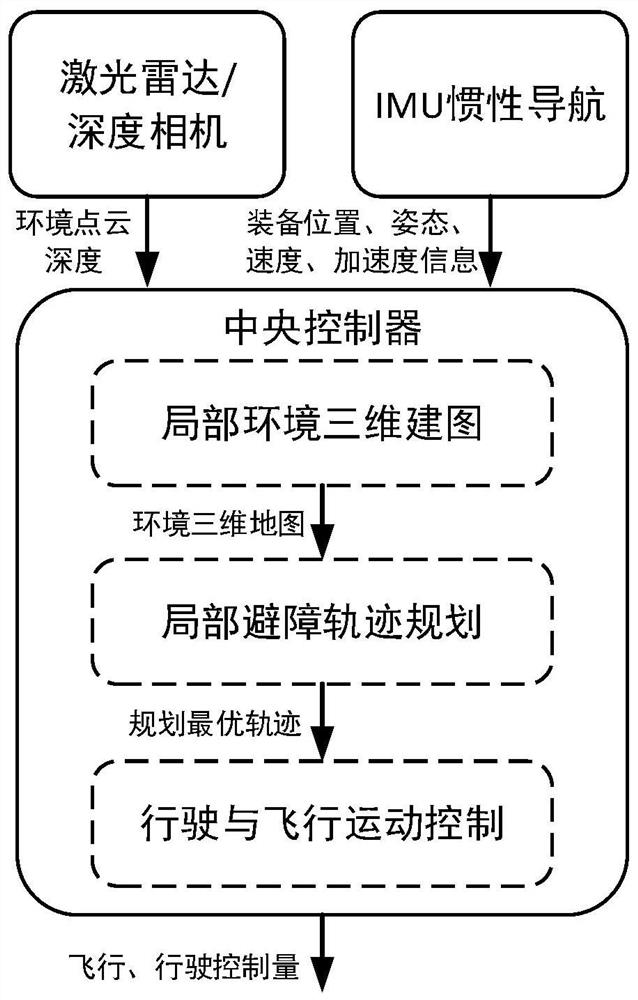
[0084] S1. Acquire the drivable area on the ground, the traversable area in the air, and the running state of the device, and establish a three-dimensional map of the environment where the device is located.
[0085] Specifically, through the environmental point cloud\depth information collected by the radar or camera of the obstacle avoidance amphibious device, the ground drivable area and the air traversable area of the obstacle avoidance amphibious device can be obtained.
[0086] S2. According to the three-dimensional map of the environment where the device is located, the optimal flight trajectory and the optimal driving trajectory of the device are respectively planned, and the optimal trajectory of the device is obtained by comparison.
[0087] According to the three-d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More