Large inertia radar tracking method and system based on timing information fitting
A technology of radar tracking and large inertia, which is applied in the direction of control using feedback, and can solve the problem of inability to achieve accurate tracking of large inertia radar.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
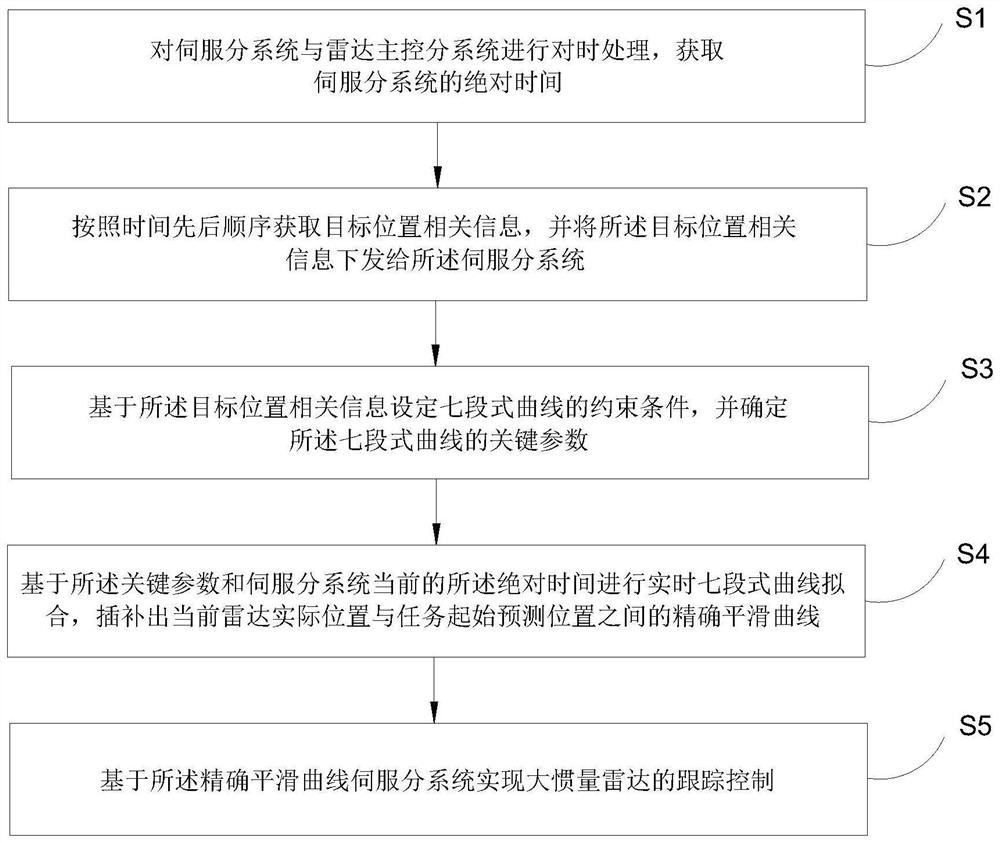
[0053] In the first aspect, the present invention first proposes a large inertia radar tracking method based on time system information fitting, see figure 1 , the method includes:
[0054] S1. Perform time synchronization processing on the servo subsystem and the radar main control subsystem to obtain the absolute time of the servo subsystem;
[0055] S2. Acquire target position related information in chronological order, and deliver the target position related information to the servo subsystem;
[0056] S3, setting the constraint condition of the seven-segment curve based on the relevant information of the target position, and determining the key parameters of the seven-segment curve;
[0057] S4, perform real-time seven-segment curve fitting based on the key parameters and the current absolute time of the servo subsystem, and interpolate an accurate smooth curve between the current radar actual position and the task initial predicted position;
[0058] S5. Based on the p...
Embodiment 2
[0132] In a second aspect, the present invention also provides a large inertia radar tracking system based on time-statistic information fitting, the system includes a computer, and the computer includes:
[0133] at least one storage unit;
[0134] at least one processing unit;
[0135] Wherein, at least one instruction is stored in the at least one storage unit, and the at least one instruction is loaded by the at least one processing unit and executes the method corresponding to the large inertia radar tracking method based on time statistics fitting as described above. program.
[0136] It is understandable that the large-inertia radar tracking system based on time-statistic information fitting provided by the embodiment of the present invention corresponds to the above-mentioned high-inertia radar tracking method based on time-statistic information fitting, and the explanations, examples, and beneficial effects of the relevant contents are as follows. For other parts, p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com