Unmanned crown block path planning method and system based on improved ant colony algorithm
An ant colony algorithm and path planning technology, applied in two-dimensional position/channel control, etc., can solve problems affecting factory production efficiency and economic benefits, collisions, losses, etc., to avoid local optimum, short path, improve The effect of production efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
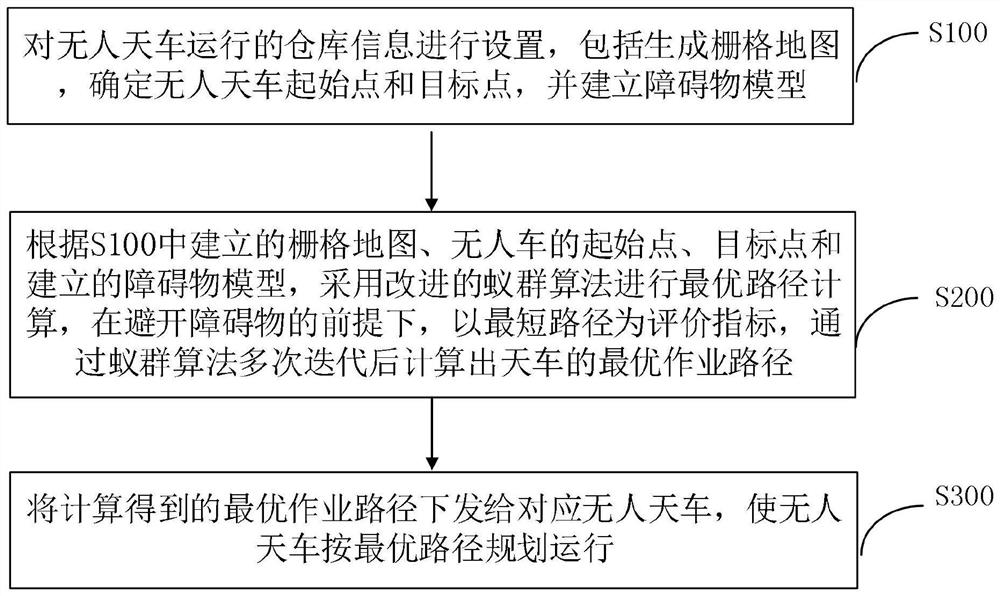
[0051] An unmanned aerial vehicle path planning method based on improved ant colony algorithm, such as figure 1 ,include:
[0052] S100. Set the warehouse information for the operation of the unmanned crane, including generating a grid map, determining the starting point and target point of the unmanned crane, and establishing an obstacle model;
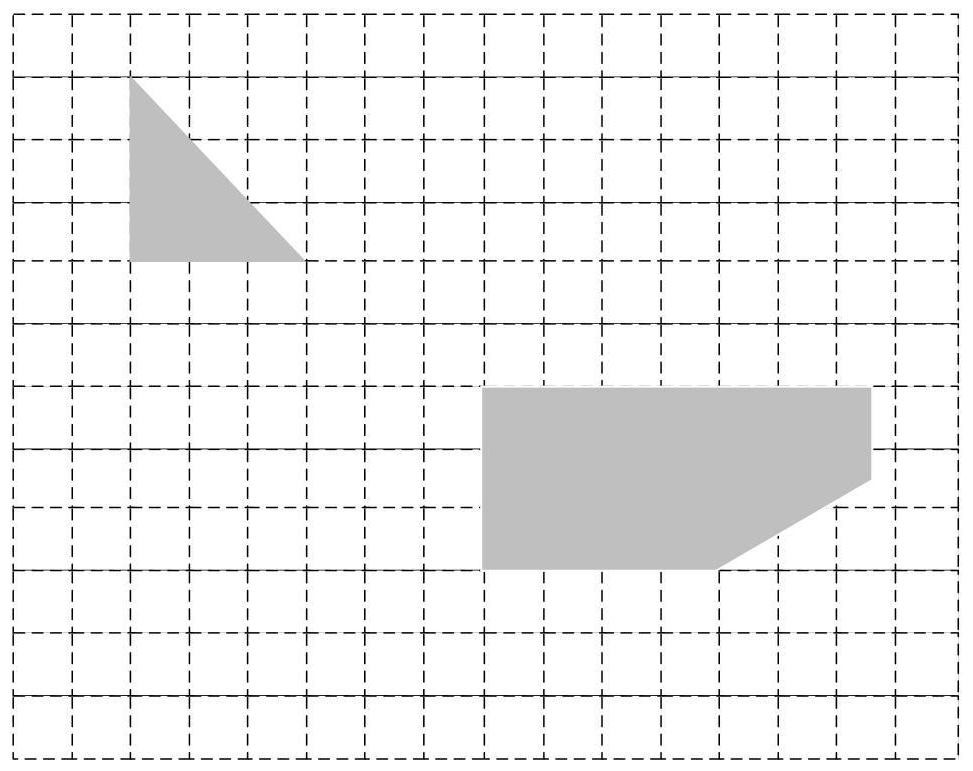
[0053] In this implementation S100, the warehouse operated by the unmanned crane is modeled by the grid method, and a grid map of the warehouse is generated; the specific method of the grid method is to divide the actual physical environment into units, and divide them into units of equal size. The grid of the map is represented; the grid of the preset size is determined, so that the environmental information represented by the map is sufficient and sufficient, and the calculation efficiency of the subsequent path planning algorithm is guaranteed. Specifically, the warehouse environment is modeled by the grid method, and a grid map ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More