

Autonomous exploration type semantic map construction method and system
A semantic map and construction method technology, applied in two-dimensional position/channel control and other directions, can solve problems such as inability to obtain object attributes, difficulty in fully understanding scene information, etc., to improve autonomy and intelligence, efficient exploration, and speed. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be further described in detail below in conjunction with the accompanying drawings, which are to explain rather than limit the present invention.
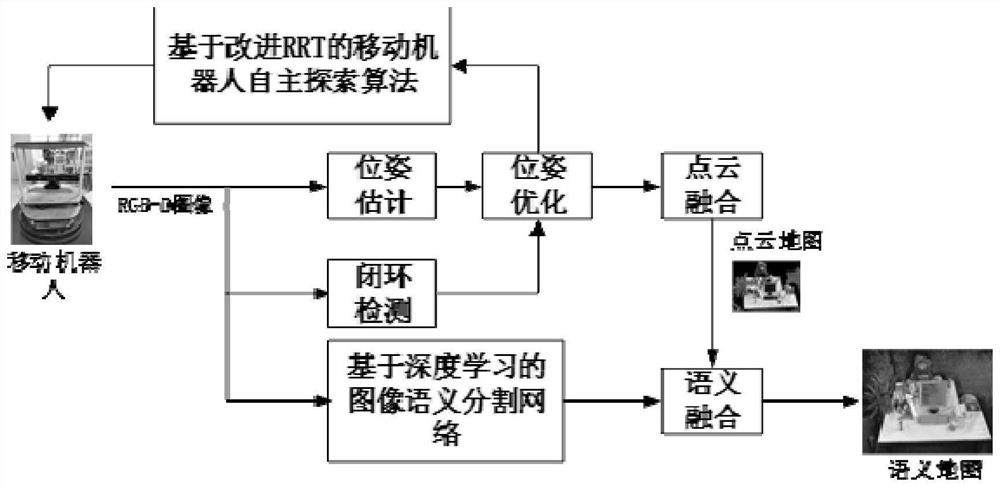
[0040] see Figure 1-6 , an autonomous exploratory semantic map construction method, including the following steps:
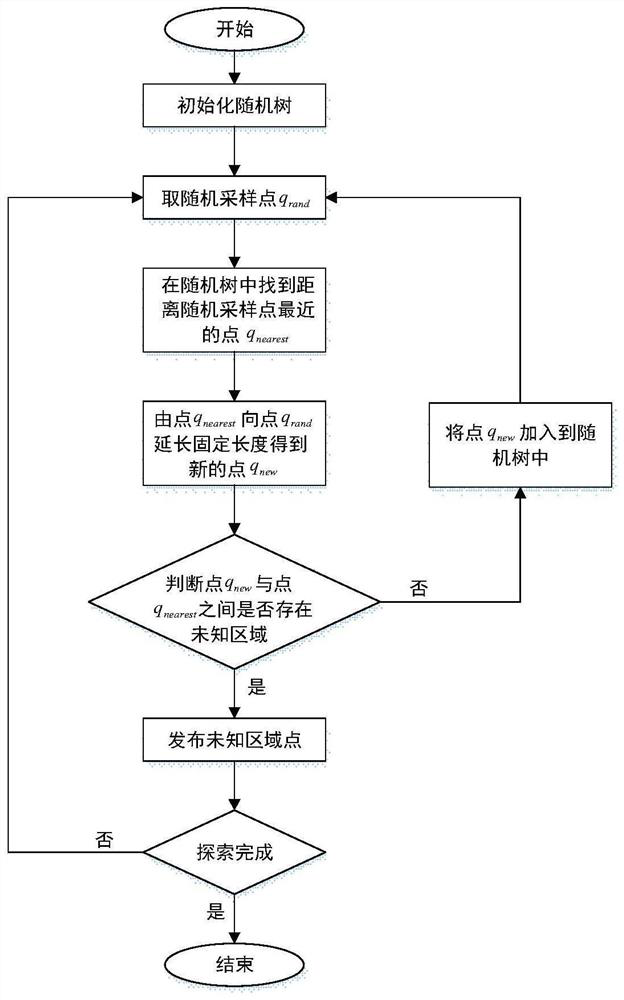
[0041] Step 1, the mobile robot autonomously explores the unknown environment based on the improved and rapidly expanding random tree autonomous exploration algorithm to obtain the frontier point of the target scene. The specific method is as follows:
[0042] S1.1) Scan the environment with Rplidar lidar and mark the explored area as 0, the unexplored area as -1, and the obstacle as 1.
[0043] S1.2) Initialize random tree and take random sampling point x rand , and find the closest point x in the random tree to the randomly taken point nearest . Then, extend a fixed length from the nearest point to the random sampling point to get a new point x new . Then, if x nearest with...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More