Control method for vehicles exceeding adjacent lanes, controller, medium and equipment
A technology of adjacent lanes and control methods, which is applied in the field of controllers, media and equipment, and control methods for vehicles beyond adjacent lanes, which can solve the problems of increased psychological pressure on drivers, long parallel time with adjacent vehicles, and increased risk factors, etc. problem, to achieve the effect of reducing the time of parallel driving, avoiding the increase of psychological pressure, and reducing the risk factor of driving
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] Exemplary embodiments of the present disclosure will be described in more detail below with reference to the accompanying drawings. While exemplary embodiments of the present disclosure are shown in the drawings, it should be understood that the present disclosure may be embodied in various forms and should not be limited by the embodiments set forth herein. Rather, these embodiments are provided so that the present disclosure will be more thoroughly understood, and will fully convey the scope of the present disclosure to those skilled in the art.
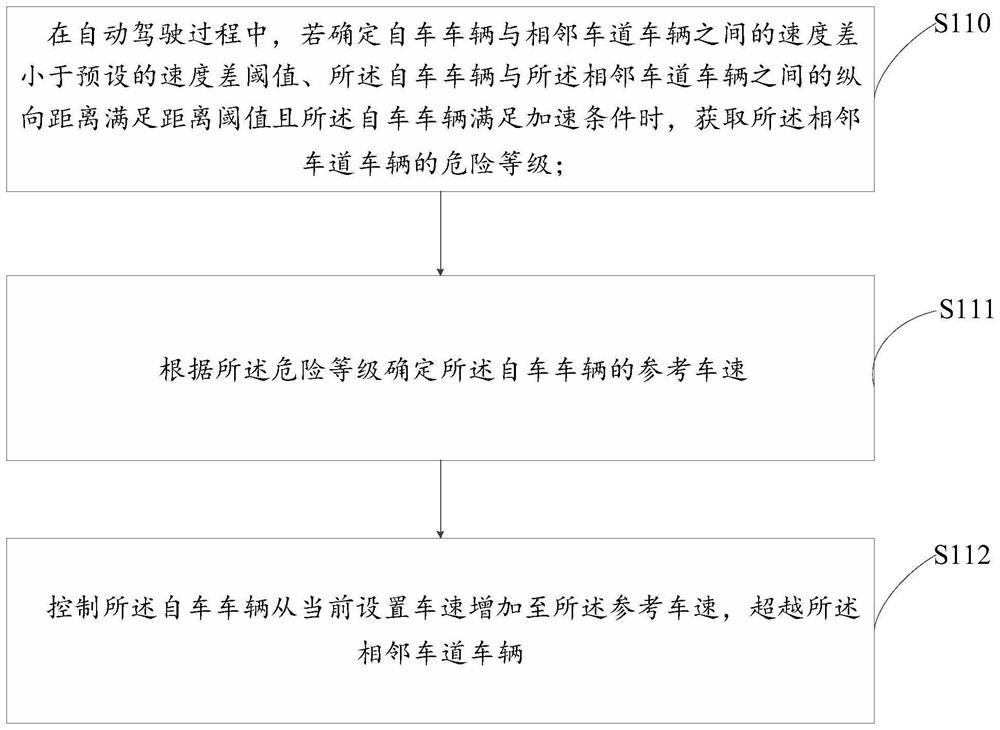
[0040] The embodiment of the present invention provides a control method for overtaking a vehicle in an adjacent lane, such as figure 1 As shown, the method includes the following steps:
[0041] S110: During the automatic driving process, if it is determined that the speed difference between the vehicle and the vehicle in the adjacent lane is less than a preset speed difference threshold, and the longitudinal distance betw...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More