

Ancient building underground drainage pipe ditch detection system and method
A detection system and drainage pipe technology, applied in closed-circuit television systems, manufacturing tools, manipulators, etc., can solve the problems of no targeted robots, etc., and achieve the effects of easy promotion and use, high-precision collection, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
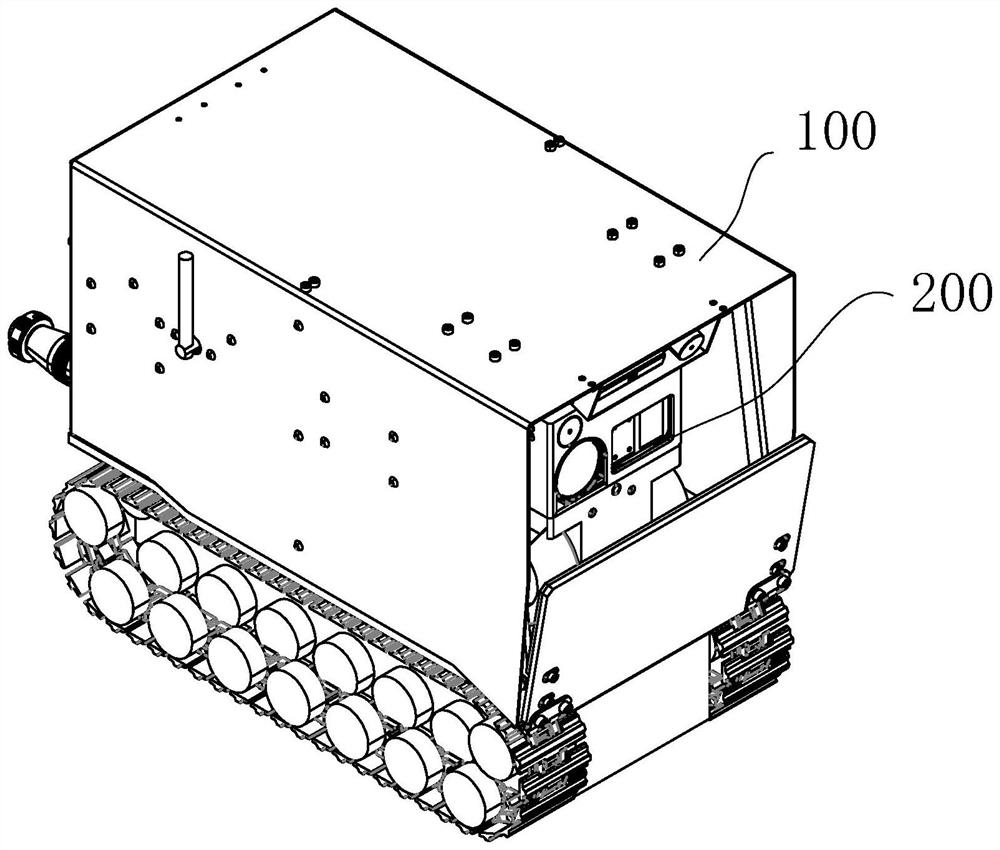
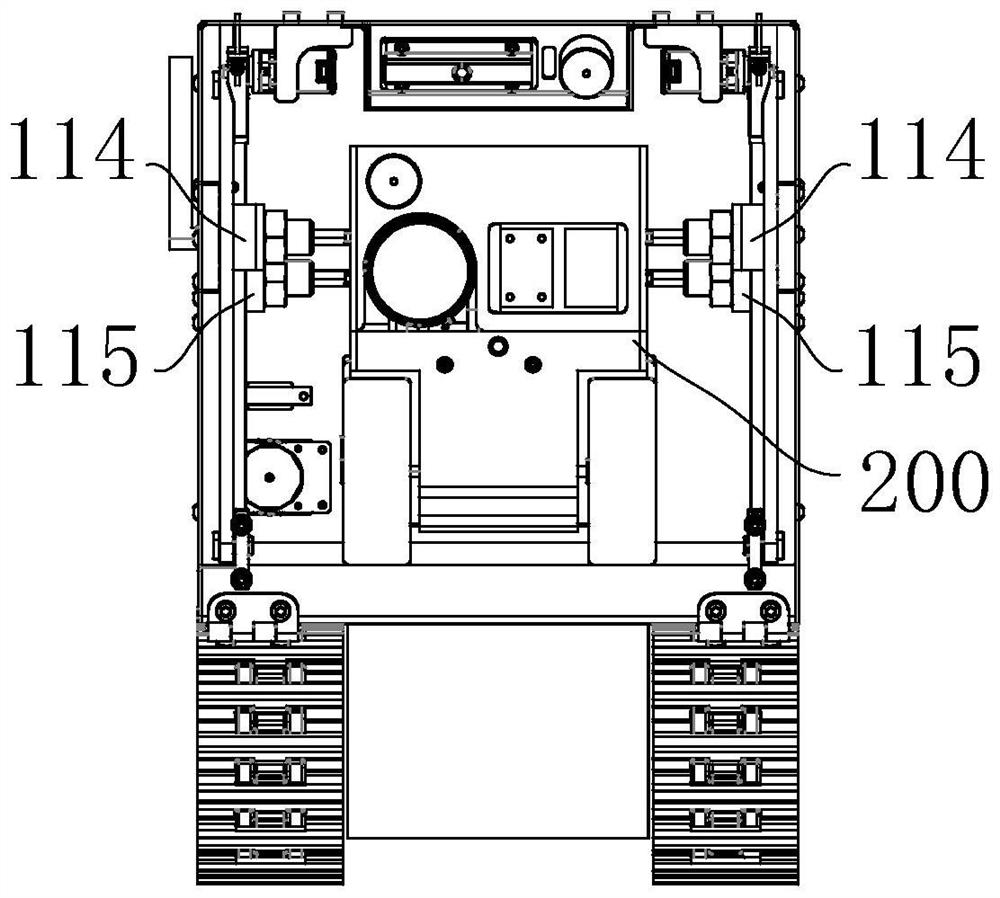
[0074] refer to figure 1 and figure 2 , the first aspect of the present application discloses a detection system for underground drainage pipe trenches of ancient buildings, including a master control center, and a main robot system 100, a reconnaissance and obstacle removal robot system 300, and a detection and perception robot system 200 connected to its signals; the main robot The system 100 is used to carry a reconnaissance obstacle removal robot system 300 and a detection and perception robot system 200; the reconnaissance obstacle removal robot system 300 is used for reconnaissance lighting, reconnaissance photography and obstacle removal; the detection and perception robot system 200 is used to collect three-dimensional information of the area to be detected and Rescue; the general control center is used to control the operation of the main robot system 100, the reconnaissance and obstacle removal robot system 300, and the detection and perception robot system 200, to ...
Embodiment 2
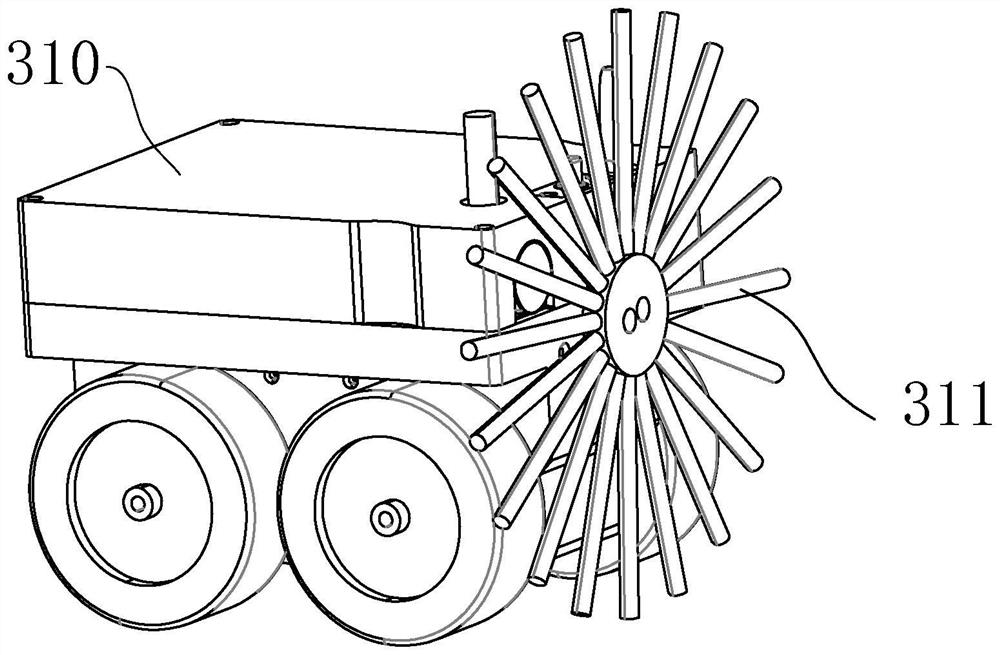
[0115] On the basis of the first embodiment, the reconnaissance obstacle removal robot system is further provided with a dozer device, and the dozer device includes a first rotary motor, a second rotary motor, a first cantilever, a second cantilever and a bucket, wherein the first cantilever is One end of the cantilever is fixed at the power output end of the first rotating motor, and the other end is fixedly connected with one side of the bucket; one end of the second cantilever is fixed at the power output end of the second rotating motor, and the other end is connected with the other end of the bucket. side fixed connection; in the initial state, the bucket is buckled upside down on the top of the first sub-robot; in the working state, the first cantilever and the second cantilever drive the bucket respectively under the driving of the first rotating motor and the second rotating motor Rotate outward to the front of the obstacle removal device, and the first cantilever, the ...
Embodiment 3
[0118] On the basis of the first embodiment, the troubleshooting device is improved.
[0119] The reconnaissance obstacle-removing robot system is also provided with a dozer device, which includes a first rotary motor, a second rotary motor, a first cantilever, a second cantilever and a bucket, wherein one end of the first cantilever is fixed on the first rotary The other end of the power output end of the motor is fixedly connected to one side of the bucket; one end of the second cantilever is fixedly connected to the power output end of the second rotating motor, and the other end is fixedly connected to the other side of the bucket.
[0120] A bearing member is arranged between the first cantilever and the second cantilever for installing an obstacle removal device; the obstacle removal device is arranged behind the bucket and does not interfere with the bucket.
[0121] The troubleshooting device is controlled by the installed first motor to start or stop, and the installe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More