

Fusion method and fusion system for course angle measurement data of unmanned aerial vehicle
A fusion method and technology of measuring data, applied in the field of UAV navigation, can solve the problem that UAV navigation cannot accurately measure the heading, etc., and achieve the effect of good accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
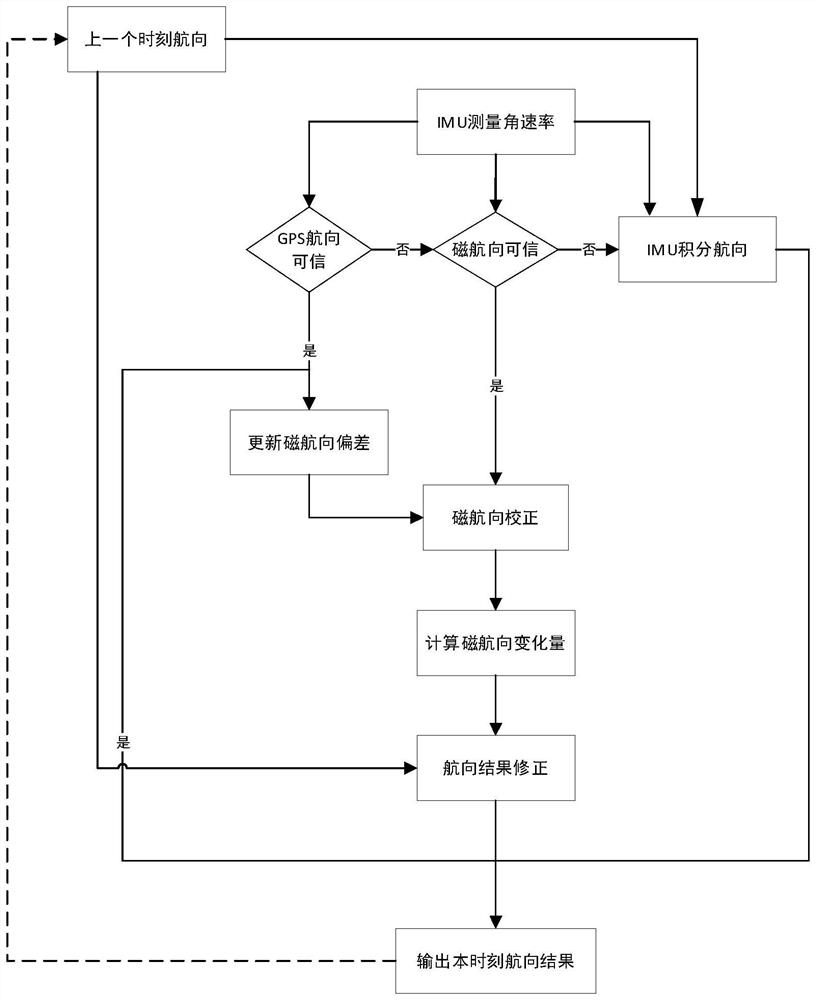
[0041] see figure 1 , the present embodiment provides a fusion method of UAV heading angle measurement data, including:
[0042] S100: UAV collects magnetic heading data covering 360 degrees on the ground, and calibrates it in different directions;
[0043] The UAV collects magnetic heading data in the air covering 360 degrees and calibrates it in various directions.
[0044] Among them, an ellipse or an ellipsoid correction method may be used for the magnetic heading calibration method.
[0045] S201. Obtain the heading angle by locating the heading and heading angle rate of change; heading angle is obtained from magnetic heading and heading angle The rate of change of , and the heading angle is obtained by integrating the heading of the IMU and heading angle rate of change;
[0046] S202, determine the heading angle Whether its own signal quality meets the threshold judgment conditions (for example, the number of satellites is greater than 7, the position acc...
Embodiment 2
[0059] This embodiment provides a fusion system of UAV heading angle measurement data, including:
[0060] Heading angle data acquisition unit: obtain the heading angle by positioning the heading and heading angle Rate of change; heading angle obtained from magnetic heading and heading angle The rate of change of , and the heading angle is obtained by integrating the heading of the IMU and heading angle rate of change;
[0061] Positioning heading output unit: judging heading angle Whether its own signal quality meets the threshold judgment conditions; and judge the heading angle Rate of change and heading angle Whether the deviation between the rates of change exceeds the threshold; if the heading angle Its own signal quality exceeds the threshold judgment condition and the heading angle Rate of change and heading angle If the deviation between the rates of change does not exceed the threshold, the heading angle is determined Trustworthy, otherwise det...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More