

Mechanical arm used in microsurgery operation robot
A surgical robot and microsurgery technology, applied to surgical robots, surgery, manipulators, etc., to achieve the effects of reducing compensation, facilitating adjustment, and realizing accurate motion control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
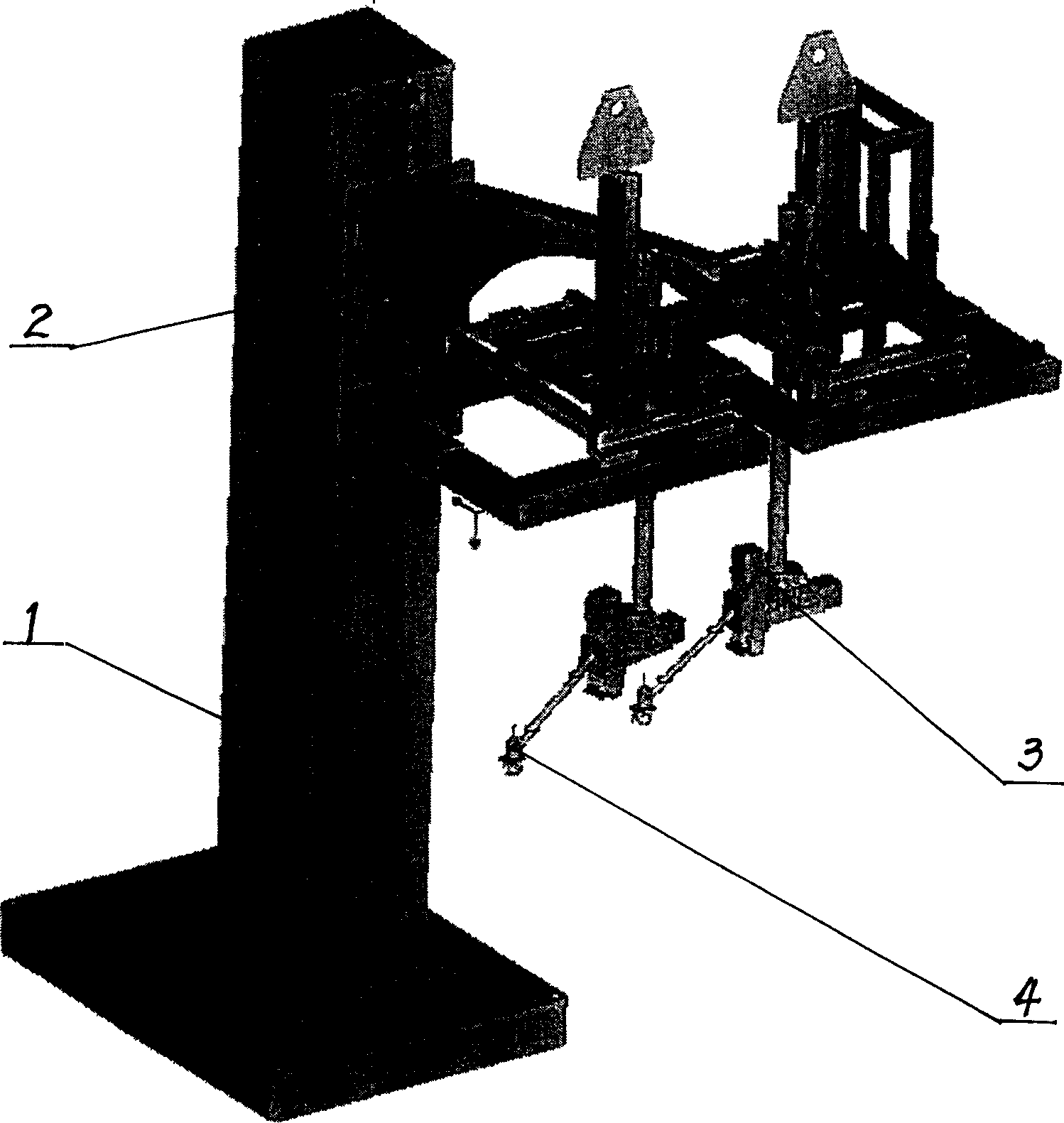
[0048] figure 1 It shows the overall structure of the mechanical arm used in the microsurgical robot of the present invention, including the mechanical arm used in the microsurgical robot, including a support component 1 connected at one end for realizing three directions in the Cartesian coordinate system. Large-scale preliminary positioning of the boom part 2, the other end of the boom part 2 is provided with precise positioning in three directions in the Cartesian coordinate system to ensure that the robot finger can move slightly within the specified working range and achieve repeatability. The positioning fine adjustment mechanism 3, and the small arm part 4 connected with the fine adjustment mechanism 3 to clamp the robot finger and realize the posture adjustment of the finger in two directions.
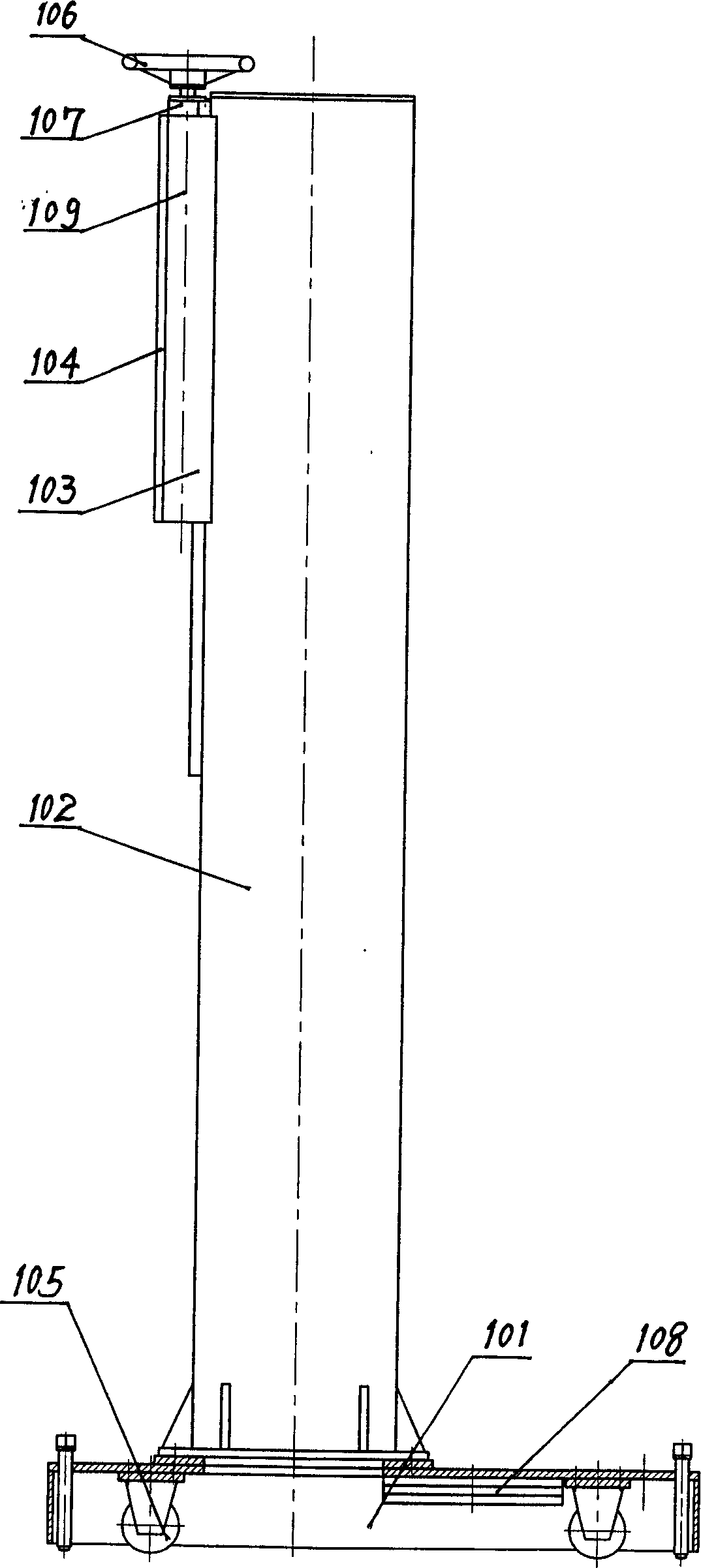
[0049] figure 2 It is shown ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More