

Thigh-bone positioning method for full knee-joint replacement operation by robot
A total knee replacement and robotic technology, applied in the field of robotic total knee replacement surgery, can solve the problems of difficult femur positioning and fast re-matching, and achieve the effect of reducing surgical costs, complexity, and pain for patients
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] In order to better understand the technical solutions of the present invention, a further detailed description will be made below in conjunction with the accompanying drawings and embodiments.
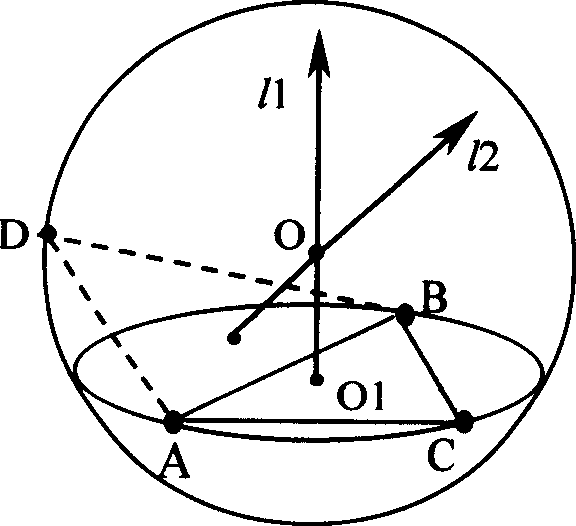
[0022] 1. When determining the center of the femoral head, the upper body and the other lower limb of the patient should be fixed, and the distal femur is partially exposed. Change the position of the distal femur to obtain the coordinate information of the center point of the intercondylar fossa at different positions, such as figure 1 A, B, C, and D in A, B, C, and D; take three space points, such as A, B, and C, to form a triangle, and find out O 1 And the straight line l perpendicular to the plane of the triangle 1 , and then use different combinations of three points, such as A, B, D, to find another straight line l passing through the circumcenter vertical triangle plane 2 . If there are 8 center point data of the intercondylar fossa collected, then a total of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More