Robot operation locating method of surgical operation leading system based on optical location
A robot surgery and navigation system technology, applied in the field of robot surgery positioning, can solve problems such as long time, complicated operation process, and impact on surgical effect, and achieve the effects of improving surgical efficiency, convenient use, and ensuring accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0032] The following examples are provided in conjunction with the content of the present invention to further describe the present invention.
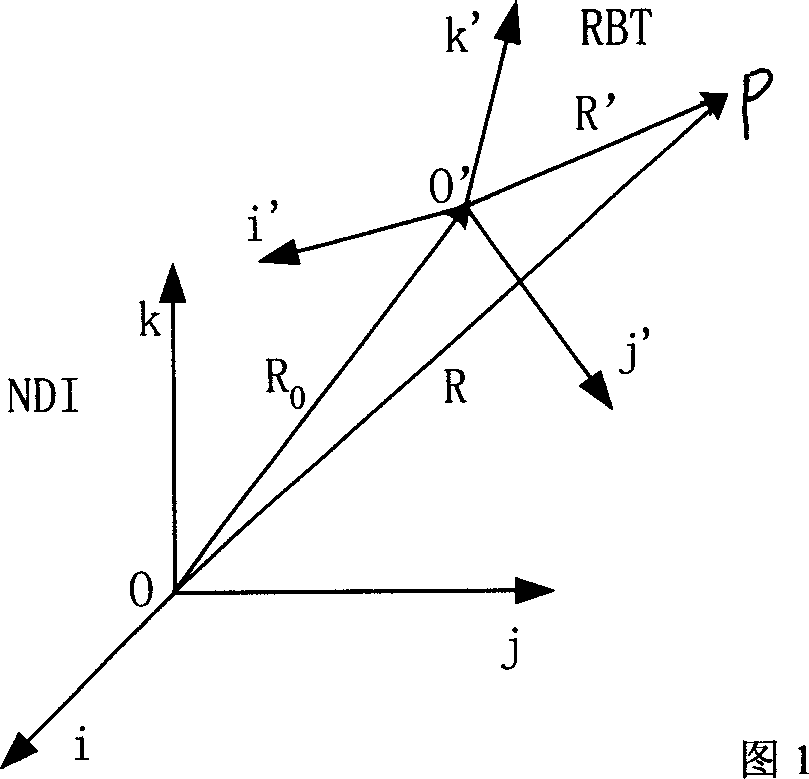
[0033] As shown in Figure 1, take a case of brain surgery as an example, based on a P41.6MHz 256 memory PC, take a robot system combined with NDI POLARIS Optical Tracking System as an example to illustrate, the specific steps are as follows:
[0034] 1. When assembling the robot, install three mark positions on the base to mark the two direction axes of the robot's reference coordinate system. The three marks are respectively marked as O, S, R, Indicates the i-axis of the robot's reference coordinate system, Indicates the k-axis;
[0035] 2. Use the positioning pointer of the NDI optical tracker to collect the three mark points of the device on the robot base, and complete the registration of the robot reference coordinate system. The coordinates of the registration points are O[105 259 -1977], S[105 275 -2000] ], R[2 259 -1977]; ...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap