

Magnetic-suction crawler type wall-creeping robot based on synchronous cogbelt
A technology of a synchronous toothed belt and a wall-climbing robot, applied in the field of robots, can solve problems such as affecting the reliability of adsorption, and achieve the effects of reliable performance, low cost and stable operation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
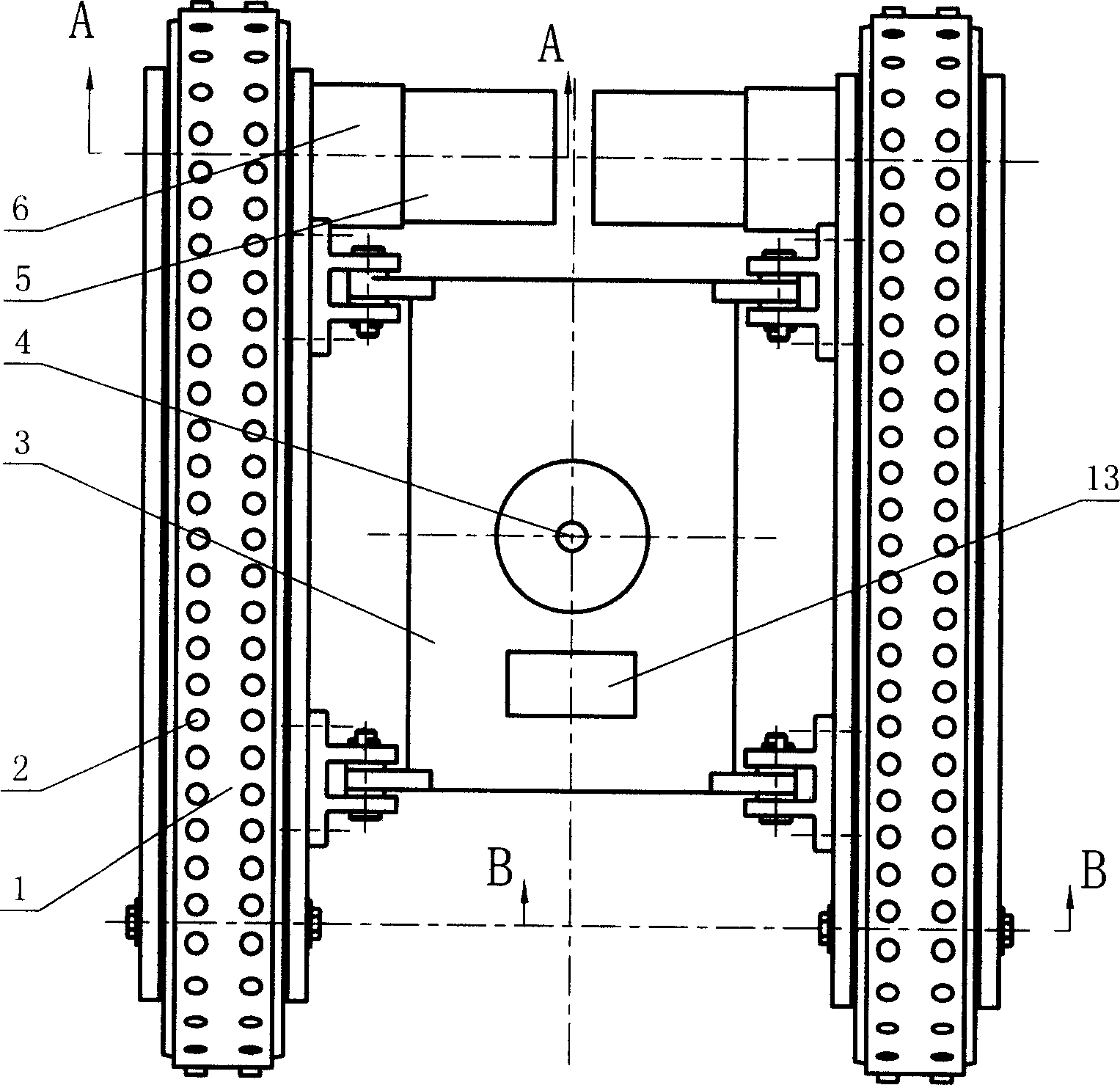
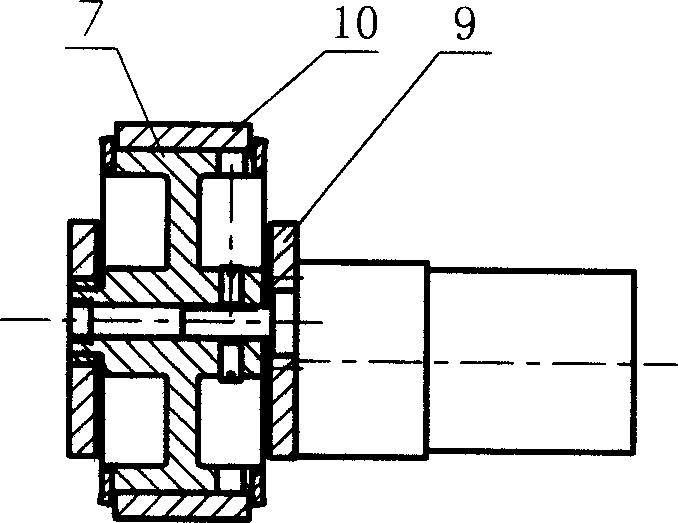
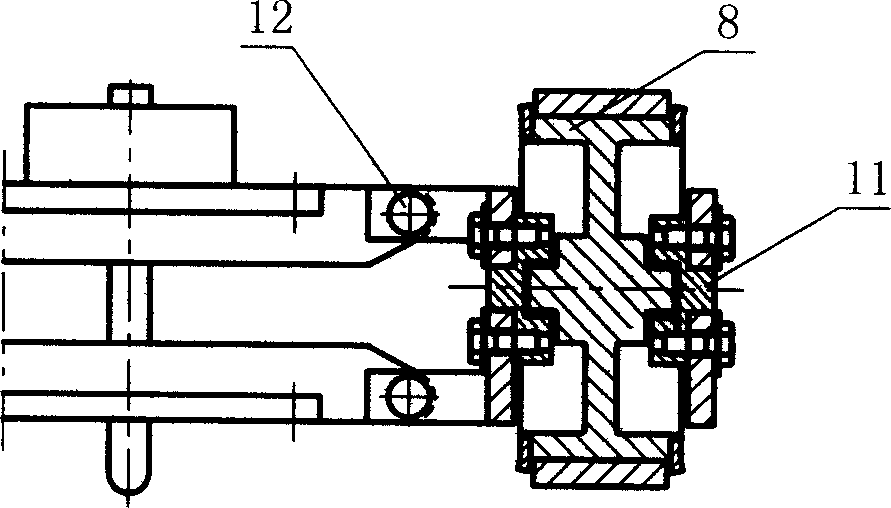
[0016] Such as figure 1 , figure 2 , image 3 As shown, the present invention includes: two sets of crawler-type running mechanism 1, magnetic adsorption member 2, hinged frame 3, actuator 4 and electrical control device 13, and described crawler-type running mechanism 1 includes: driving motor and speed measuring code disc 5. Reducer 6, driving synchronous pulley 7, driven synchronous pulley 8, operating mechanism bracket 9, synchronous toothed belt 10 and tensioning device 11, driving synchronous pulley 7 and driven synchronous pulley 8 with bearings respectively Supported at the front and rear ends of the running mechanism bracket 9, the active synchronous pulley 7 is connected to the output shaft of the reducer 6, the input shaft of the reducer 6 is connected to the drive motor and the speed measuring code disc 5, and the bearing seat of the driven synchronous pulley 8 It can slide in the chute of the tensioning device 11 to tension the synchronous toothed belt 10. The ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More