

Under water magnetic adsorption danger eliminating robot for submarine
A magnetic adsorption and robotics technology, applied in the field of robotics, can solve problems such as explosions, collisions, operational errors, and the need for a lot of time to reach the accident site
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
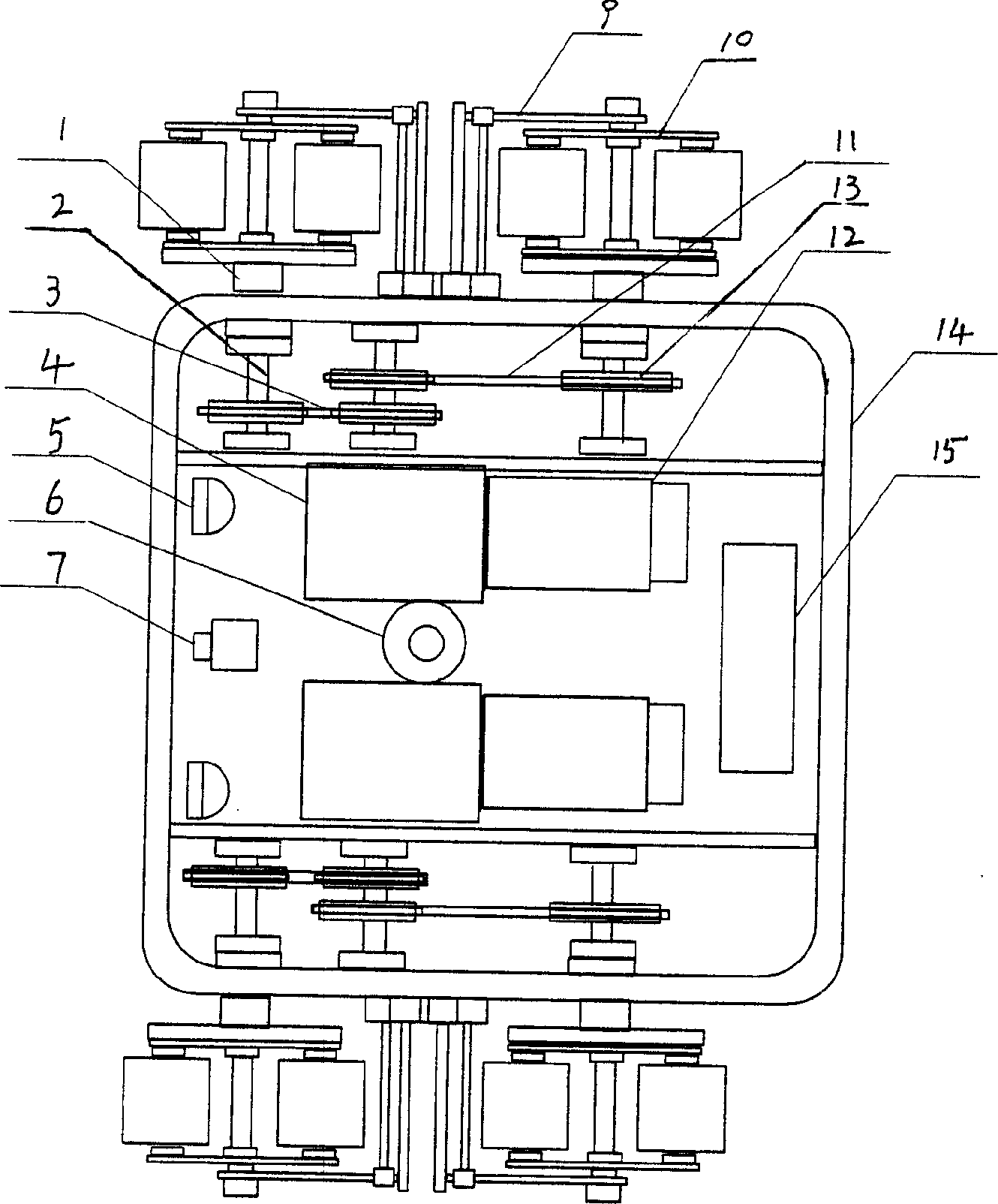
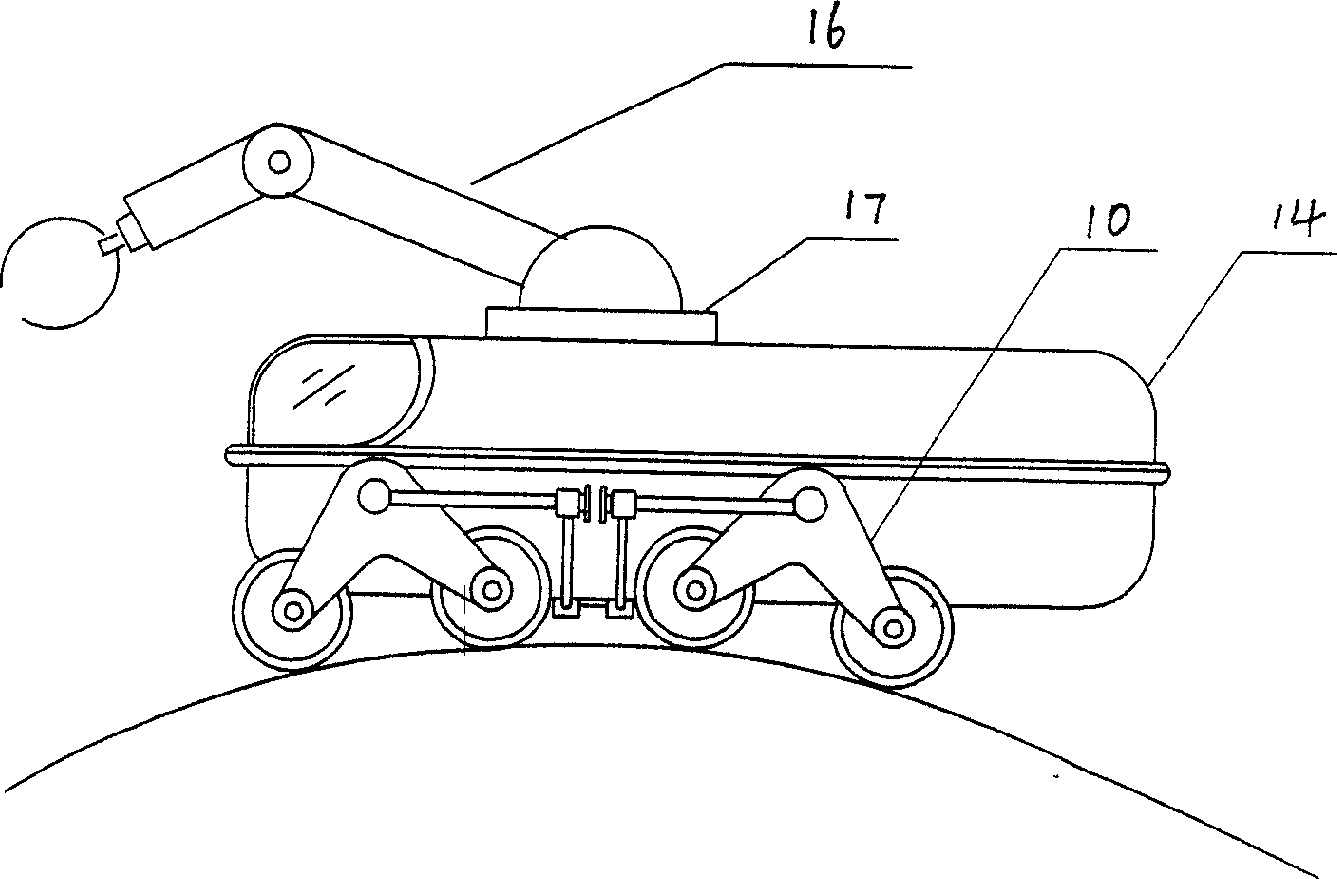
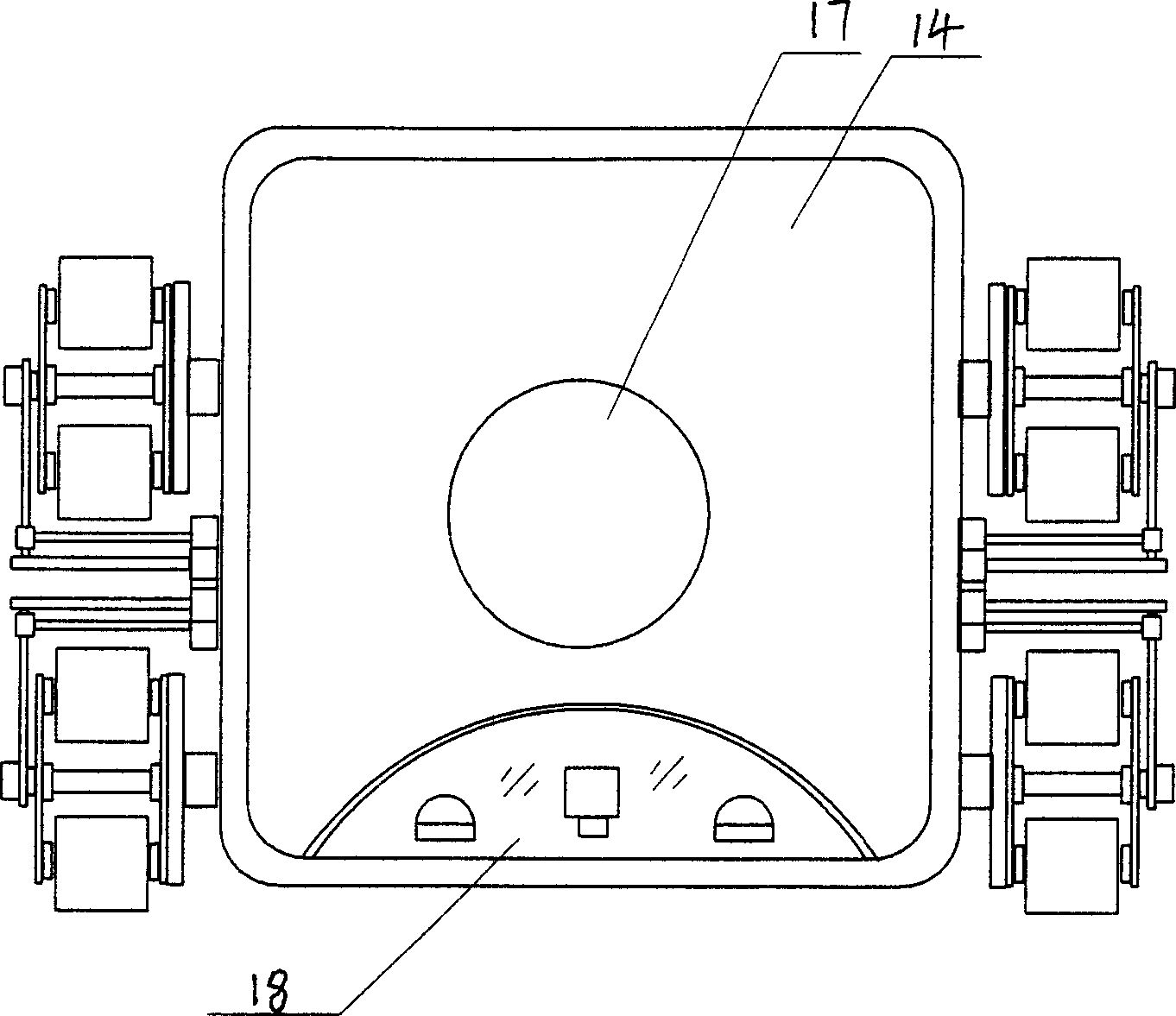
[0016] Such as figure 1 , as shown in 2, the present invention comprises car book (14), on the platform (17) above car body (14) manipulator (16) is housed, and the kind of manipulator is selected according to lifesaving needs. The two-star magnetic wheel traveling mechanism is equipped with in the both sides of car body (14) bottom. In this embodiment, the traveling mechanism is composed of four two-star magnetic pulleys, and the number of two-star magnetic pulleys is designed according to requirements. Two two two-star attracting magnetic wheels (10) that are symmetrical on the left and right sides form a group of wheel pairs. Each two-star magnetic pulley (10) has 2 magnetic pulley units (10-6) assembled between two V-shaped support plates (10-9), and a gear (10-1) is installed on one of the support plates. ) and the two bridge gears (10-2) meshed with each other, the two bridge gears (10-2) mesh with the adjacent star gears (10-3) respectively to form an automatic two-st...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More