

Machine vision based estimation method for local geometry of driveway and vehicle location
A local geometry and machine vision technology, which is used in traffic control systems, instruments, and traffic flow detection of road vehicles.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
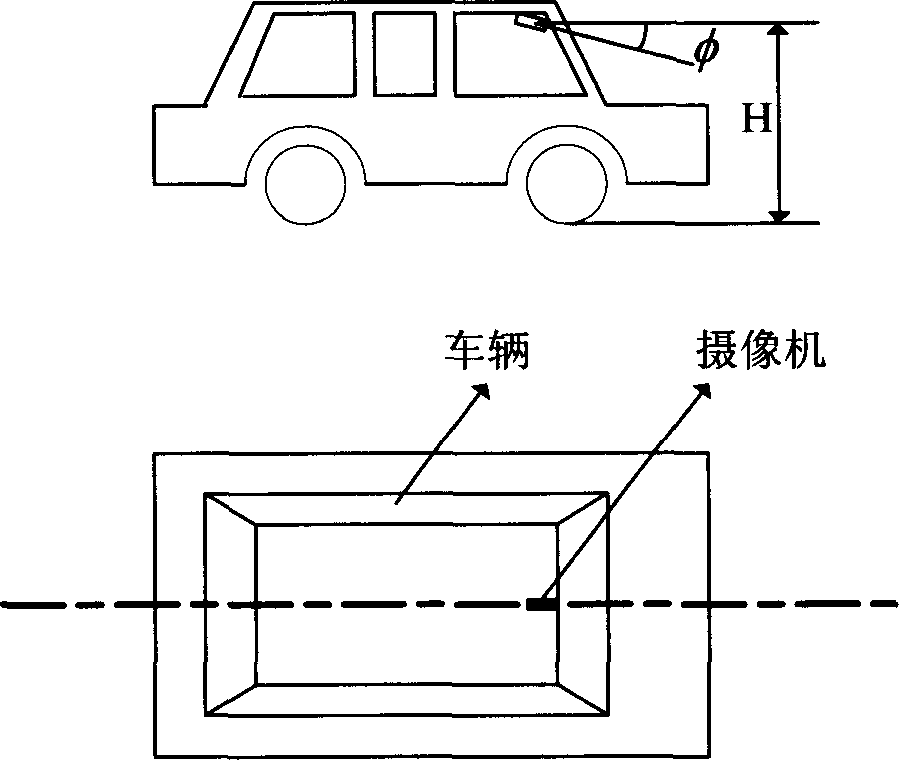
[0042] (1) if figure 1 As shown, the equipment included in this embodiment includes: a camera system and a microprocessor. The camera system captures images of the road ahead of the vehicle and transmits them to the microprocessor. The microprocessor processes the images to obtain the width and curvature of the lane. And the lateral position and heading of the vehicle in the lane.
[0043] (2) if figure 2 As shown, the camera is installed behind the windshield of the vehicle, the height of the camera from the ground is H, the angle between the optical axis of the camera and the ground is φ, the yaw angle and roll angle of the camera are 0, and the coordinates of the center of the image are (u 0 , v 0 ), α u and alpha v are the horizontal scale factor and vertical scale factor of the camera, respectively.
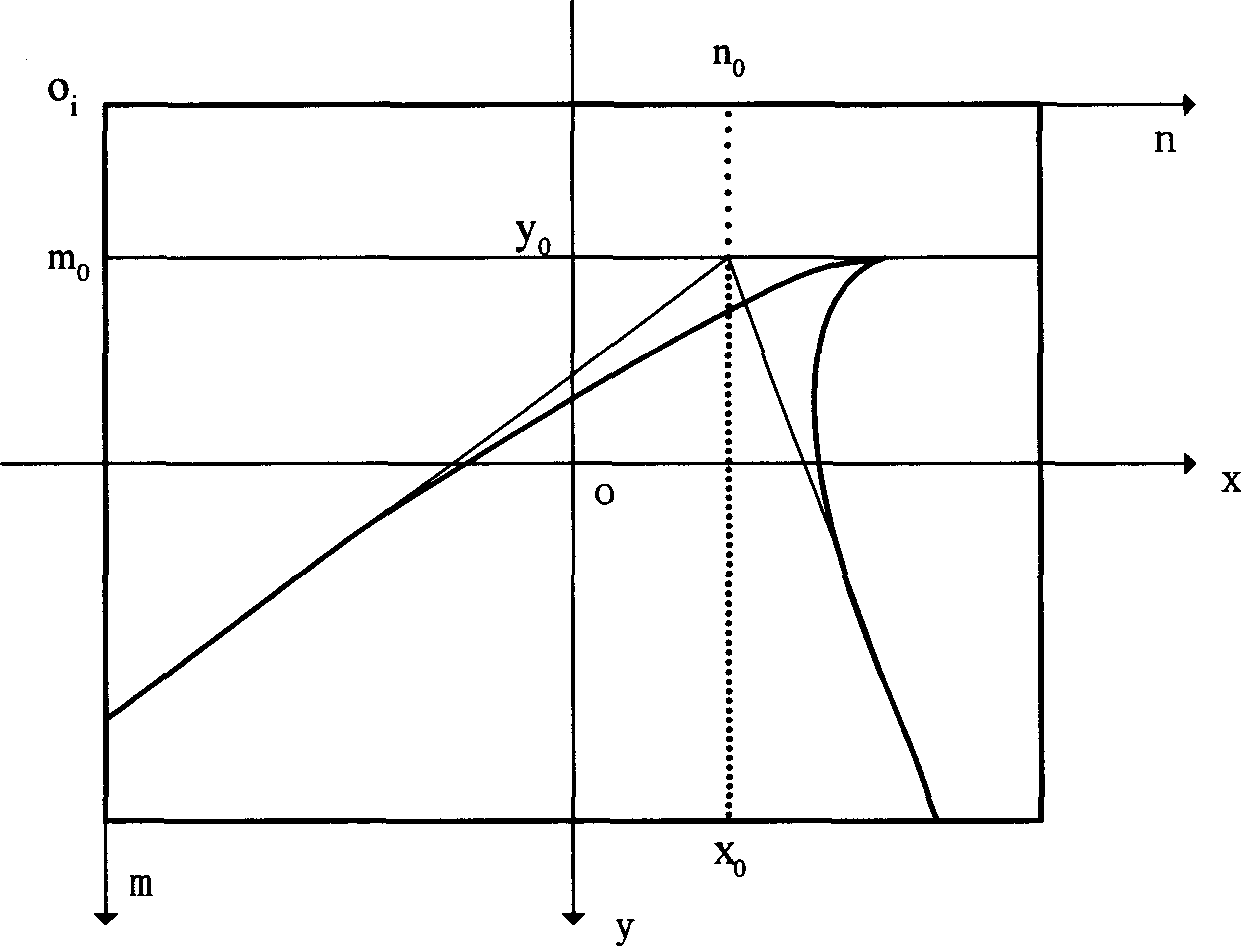
[0044] (3) if image 3 As shown, the lane markings in the image coordinates are represented by a deformation template, and the parameters of the deformation template ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More