Engine output control device
A technology of engine output and control device, applied in the direction of engine control, machine/engine, electrical control, etc., can solve problems such as starting acceleration dissatisfaction, vehicle speed difference, etc., and achieve the effect of eliminating the deterioration of acceleration performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] Hereinafter, embodiments of the present invention will be described in detail based on the embodiments shown in the drawings.
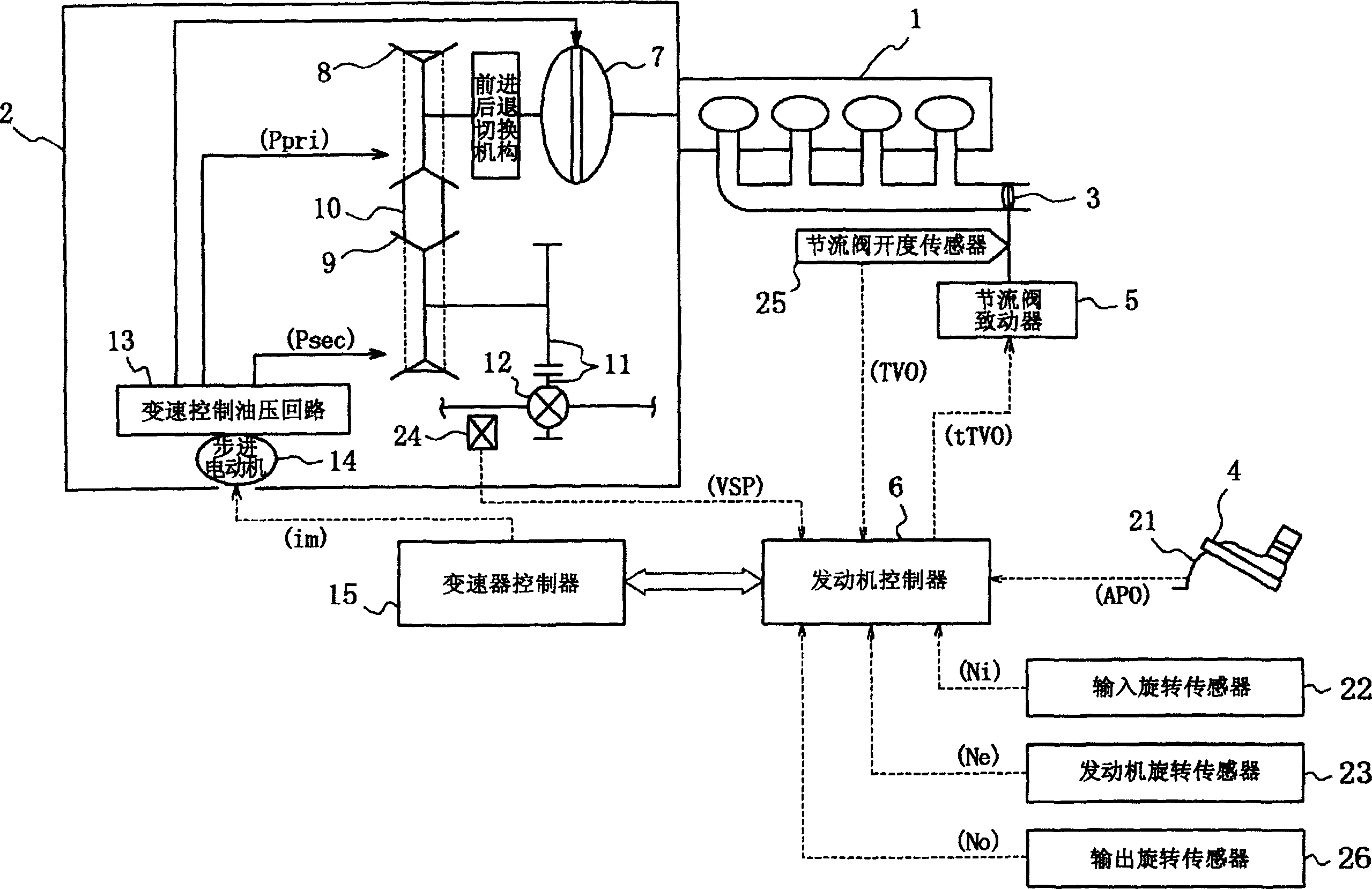
[0058] figure 1 A vehicle powertrain and its control system including an engine output control device according to an embodiment of the present invention are shown, and the powertrain is constituted by an engine 1 and a continuously variable transmission 2 .
[0059] The engine 1 is a gasoline engine, but the throttle valve 3 as its output determination unit is not mechanically connected to the accelerator pedal 4 operated by the driver, but is separated from it, and the throttle valve 3 is controlled by the throttle valve actuator 5 . The opening is electronically controlled.
[0060] The throttle valve actuator 5 operates according to the target throttle valve opening tTVO determined by the engine controller 6 according to the operation of the accelerator pedal 4 as described later, and the amount of operation is controlled. Therefore, the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



