

Robot monitoring system
A technology for monitoring systems and robots, applied in general control systems, control/regulation systems, computer control, etc., to solve problems such as inability to display images that can be observed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] Embodiments of the present invention will be described in detail below with reference to the drawings. In the drawings, the same reference symbols are assigned to the same or similar components.
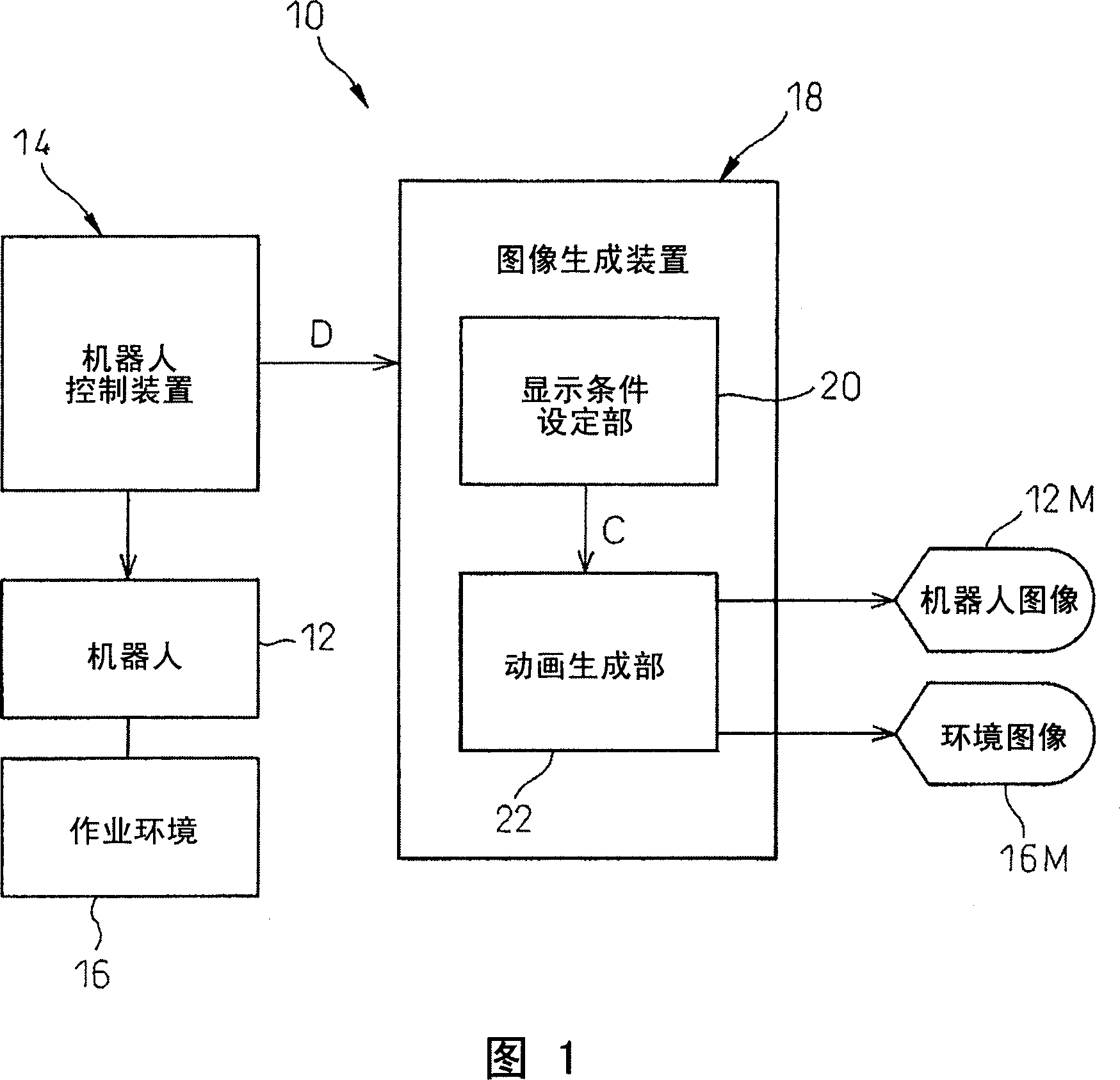
[0023] Referring to the drawings, FIG. 1 is a functional block diagram showing the basic structure of a robot monitoring system 10 in the present invention. The robot monitoring system 10 has: a robot control device 14 that controls the robot 12; and an image generating device 18 that generates a three-dimensional model image of the robot 12 and the working environment 16 of the robot 12 according to the robot control-related information D obtained from the robot control device 14. 12M and 16M are generated as animations corresponding to the actual movement of the robot 12 . The image generating device 18 has: a display condition setting unit 20, which can changeably set display conditions C including at least one of a line of sight and a drawing form of animation representin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More