

Hand control system, method, program, hand, and robot
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031]An embodiment of the hand control system of the present invention will now be described with reference to the drawings.
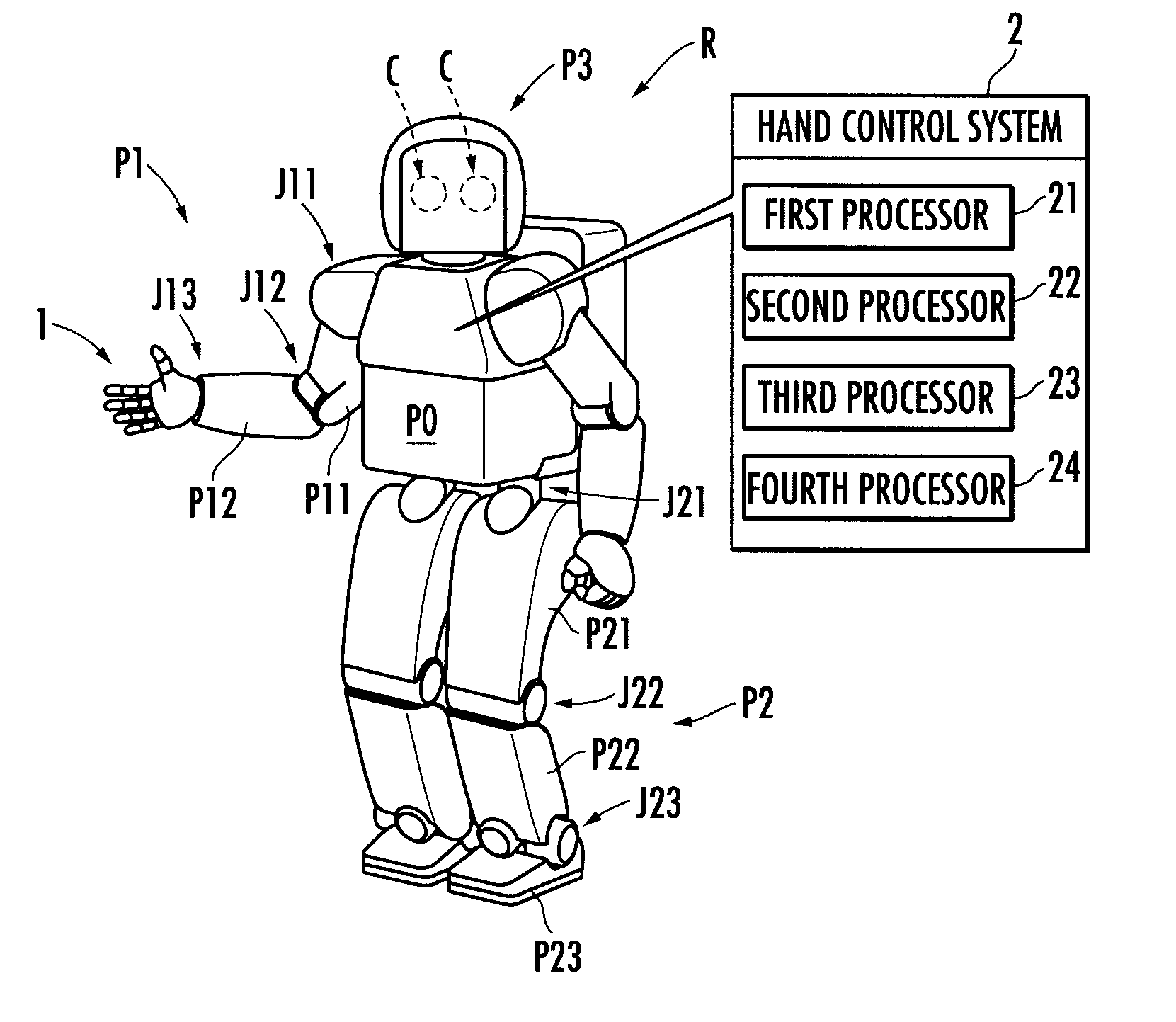
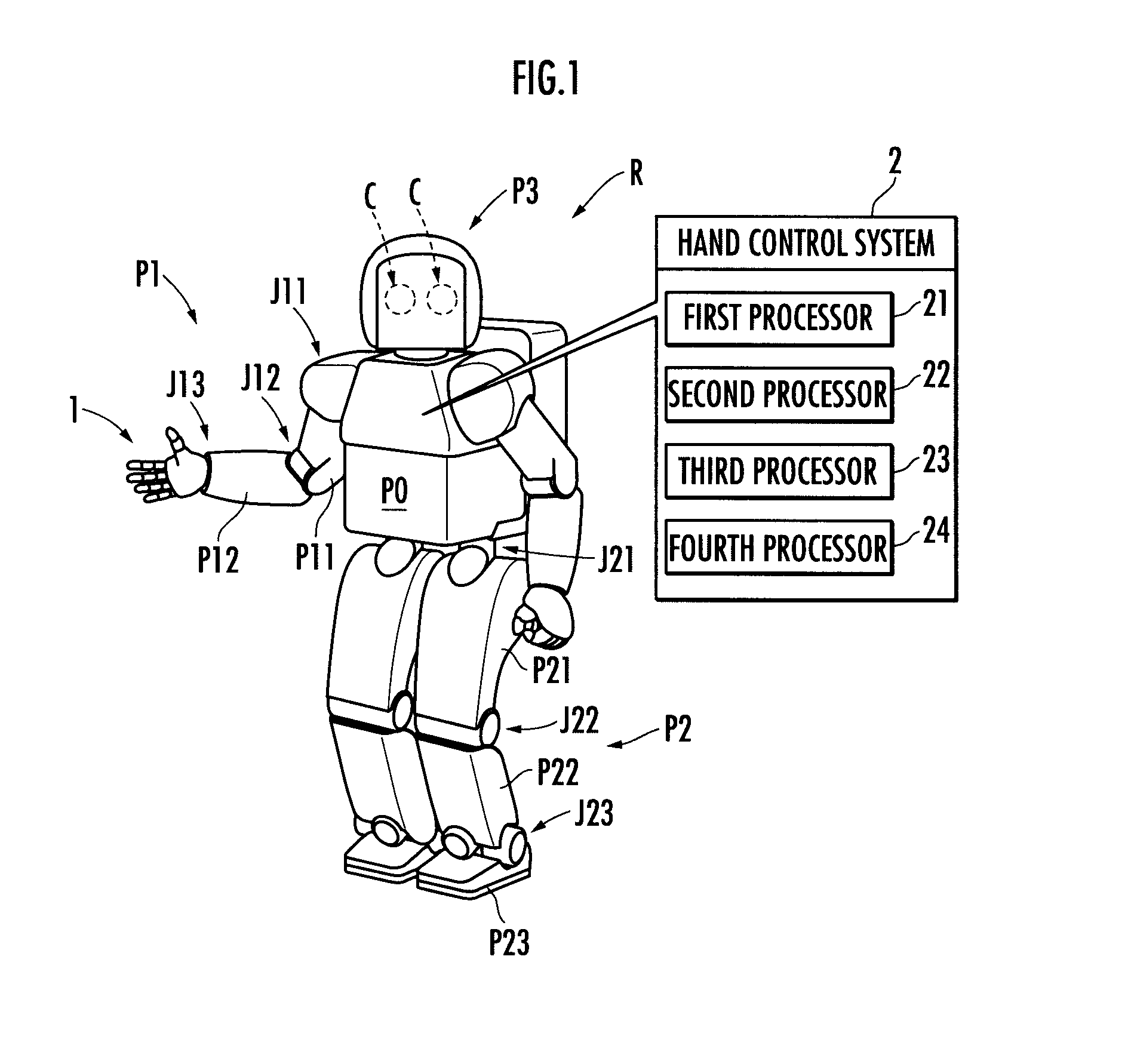
[0032]The robot R shown in FIG. 1 is a legged mobile robot, which includes, similarly to a human being, a body P0, left and right arms P1 extended from the respective sides of the body P0, a hand 1 provided at an end of each of the left and right arms P1, left and right legs P2 extended downward from a lower part of the body P0, a head P3 provided on top of the body P0, a pair of left and right CCD cameras C arranged at the head P3 and capturing the scenery in front, and a hand control system 2 configured with a CPU, a memory such as a ROM, RAM or the like, a signal input circuit, a signal output circuit and the like, and controlling the operation of the robot R.
[0033]The body P0 has an upper part and a lower part joined above and below in a manner allowing relative rotation about a yaw axis.
[0034]The arm P1 has a first arm link P11 and a second arm link P12. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More