

Device for Influencing Navigation of an Autonomous Vehicle
a technology for autonomous vehicles and devices, applied in the direction of process and machine control, distance measurement, instruments, etc., can solve the problems of inability to detect cliffs, inappropriate halting or reversing of autonomous devices, and potential interferen
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023]Reference will now be made in detail to various exemplary embodiments of the present teachings, one or more of which are illustrated in the accompanying drawings.
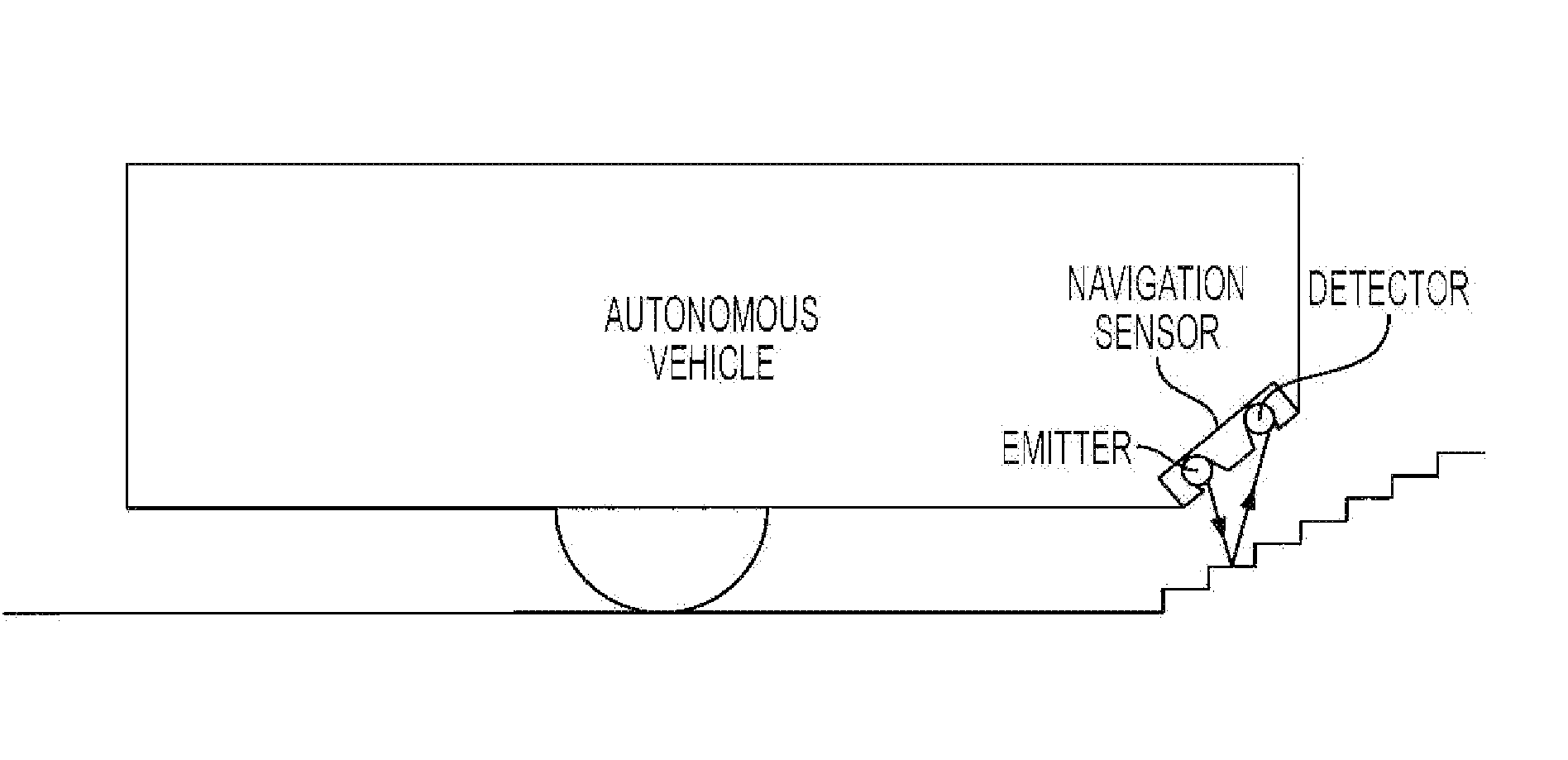
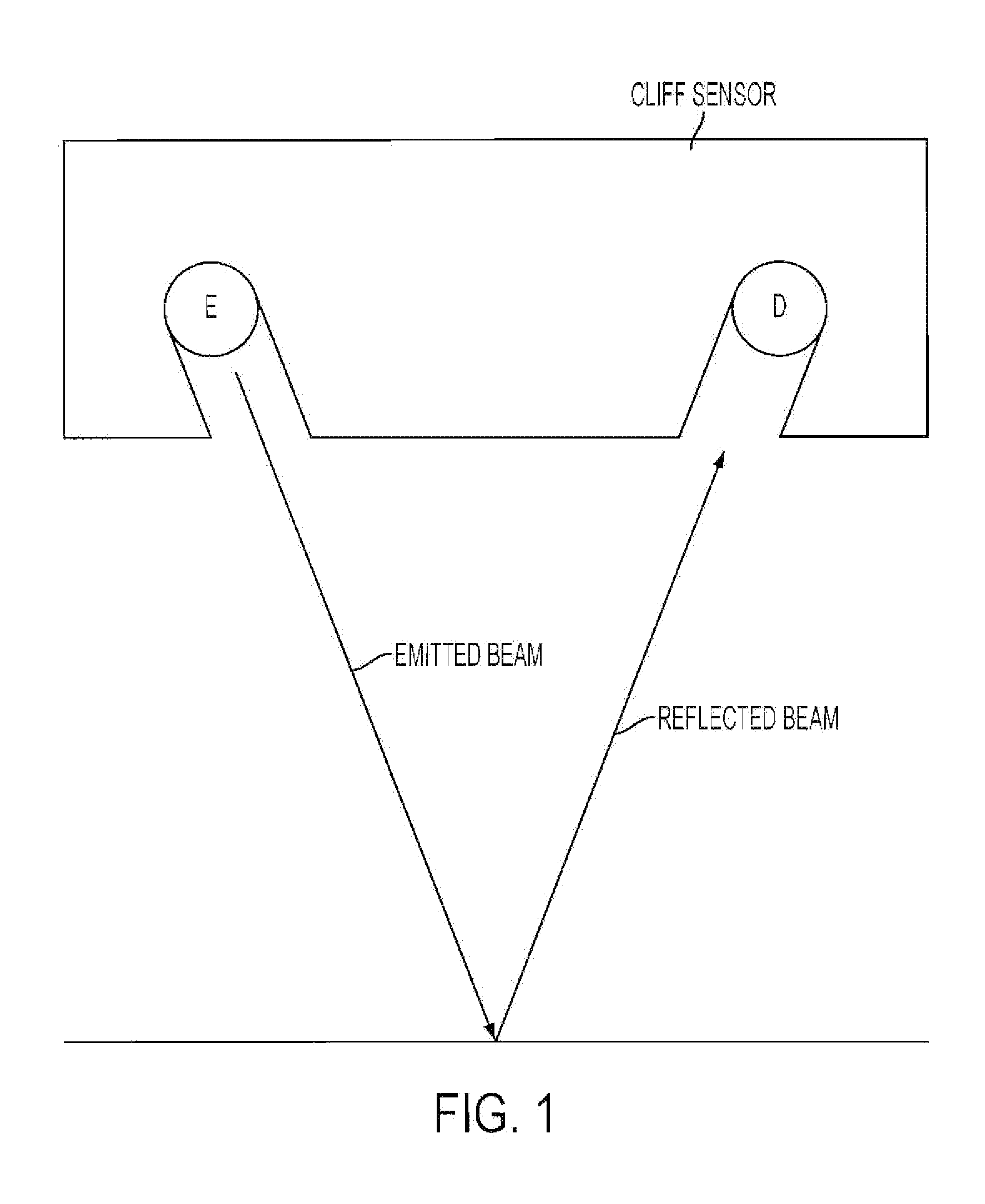
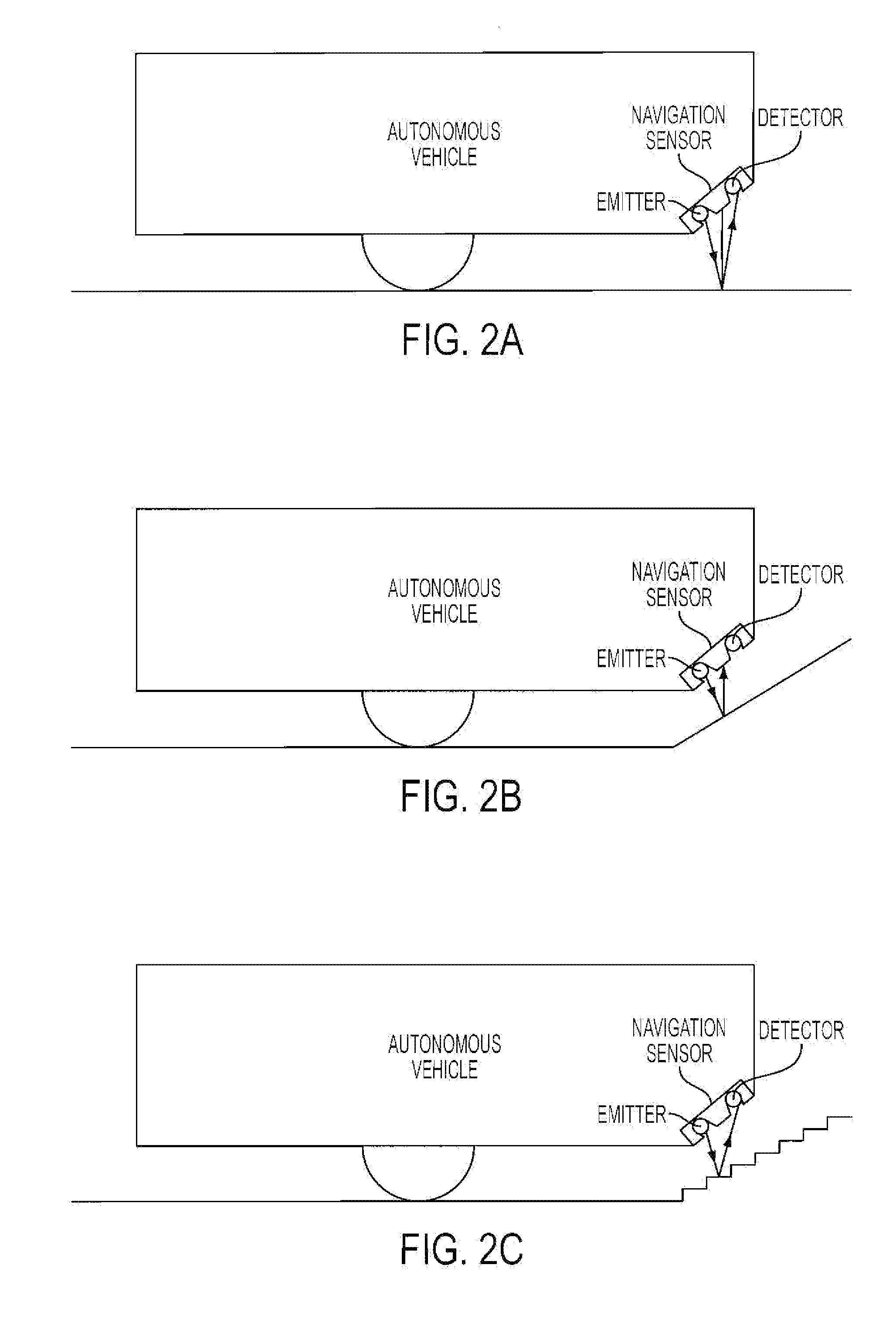
[0024]As autonomous devices such as robotic cleaning devices navigate an area such as a floor to be cleaned, their path can be substantially randomly generated and controlled by input from various sensors on the autonomous device such as, for example, cliff sensors. The cliff sensor's primary purpose is to prevent the autonomous device from driving off of a “cliff,” The cliff sensor can also be utilized, however, to control navigation of the autonomous device when reflection or the direction of a reflection of a beam emitted from the cliff sensor is controlled to influence navigational behavior of the vehicle. This can be done, for example, by (1) preventing proper reflection of the emitted cliff sensor beam to the cliff sensor detector to keep the autonomous device from entering an area, or by (2) causing reflection ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More