

Systems and methods for inertially controlling a hovering unmanned aerial vehicles
a technology of inertial control and unmanned aerial vehicles, which is applied in the field of controllers, can solve the problems of limited control inputs, slow, tedious manual control of the vehicle, and limited situational awareness of the user, and exposes the user to physical threats
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014]The following detailed description of the invention is merely exemplary in nature and is not intended to limit the invention or the application and uses of the invention. Furthermore, there is no intention to be bound by any theory presented in the preceding background of the invention or the following detailed description of the invention.
[0015]Various embodiments of the invention provide apparatus and systems for controlling inertial hovering unmanned aerial vehicles (HUAVs) using three-dimensional (3D) control inputs. Other embodiments provide methods for controlling inertial hovering HUAVs using 3D control inputs.
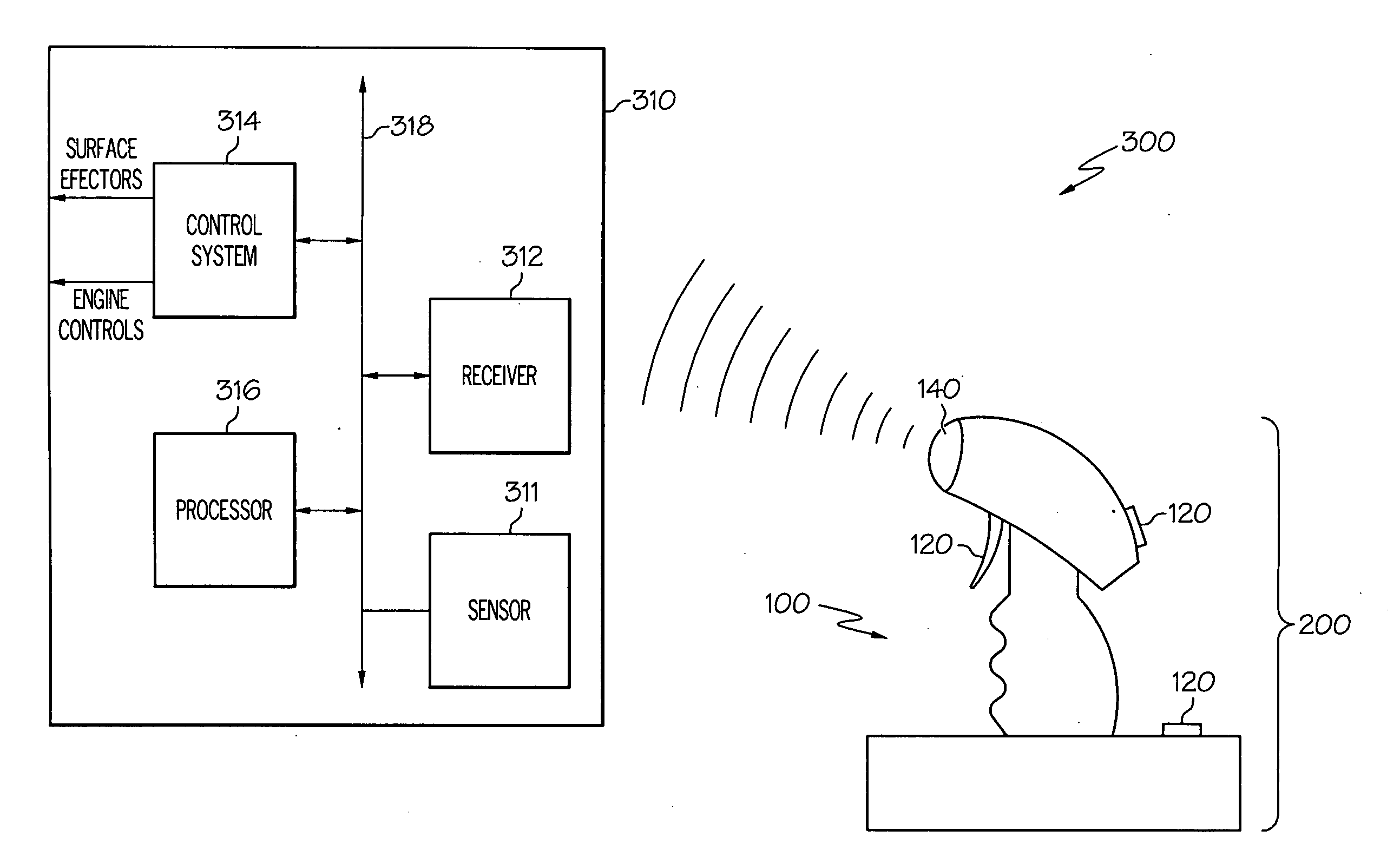
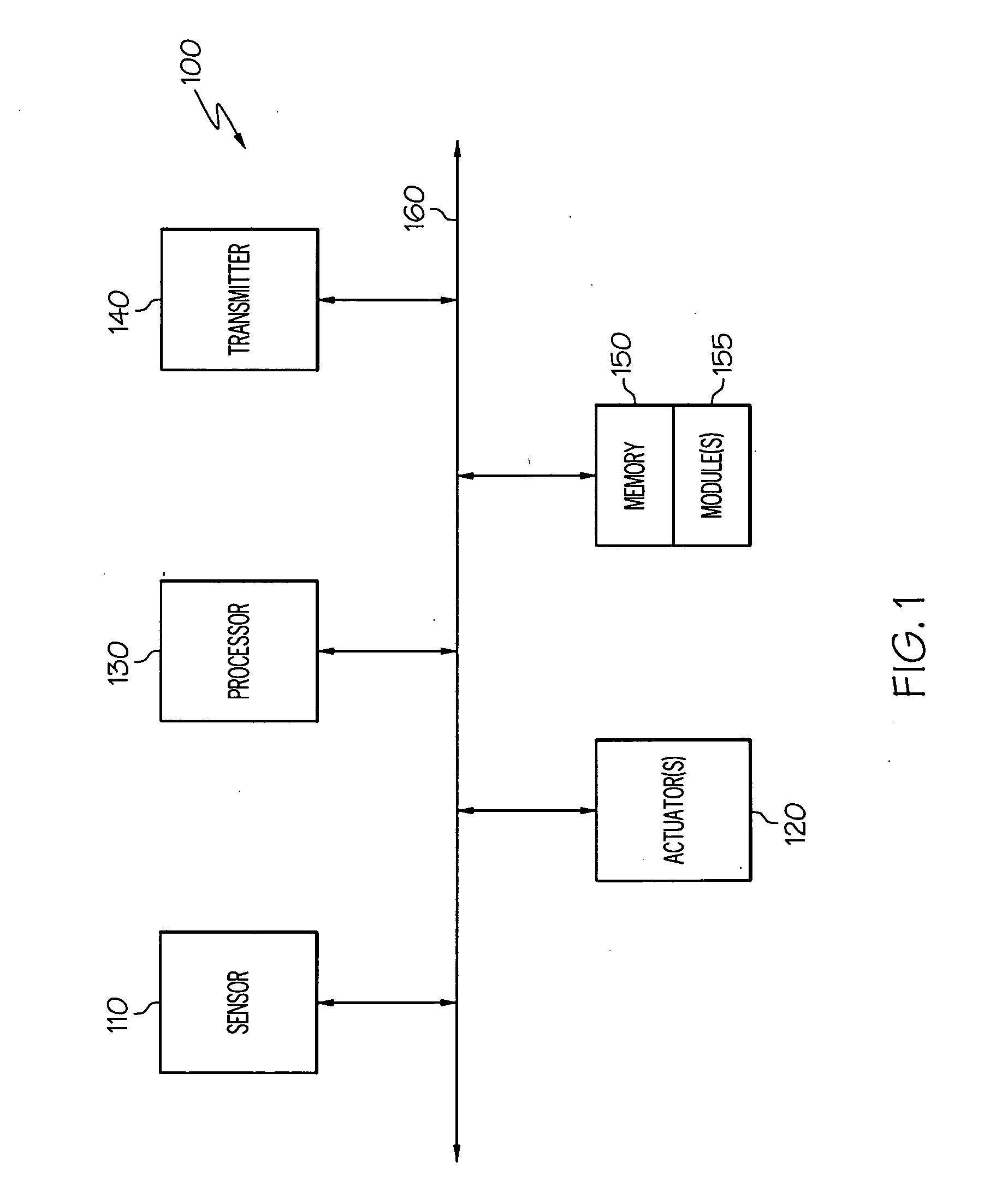
[0016]Turning now to the figures, FIG. 1 is a block diagram of one embodiment of a inertial controller 100 for an HUAV. Inertial controller 100 comprises a sensor 110, one or more actuators 120, a processor 130, a transmitter 140, and memory 150 coupled to and in communication with one another via a bus 160 (e.g., a wired and / or wireless bus). Inertial controller ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More