Air swimming toy with steering device
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
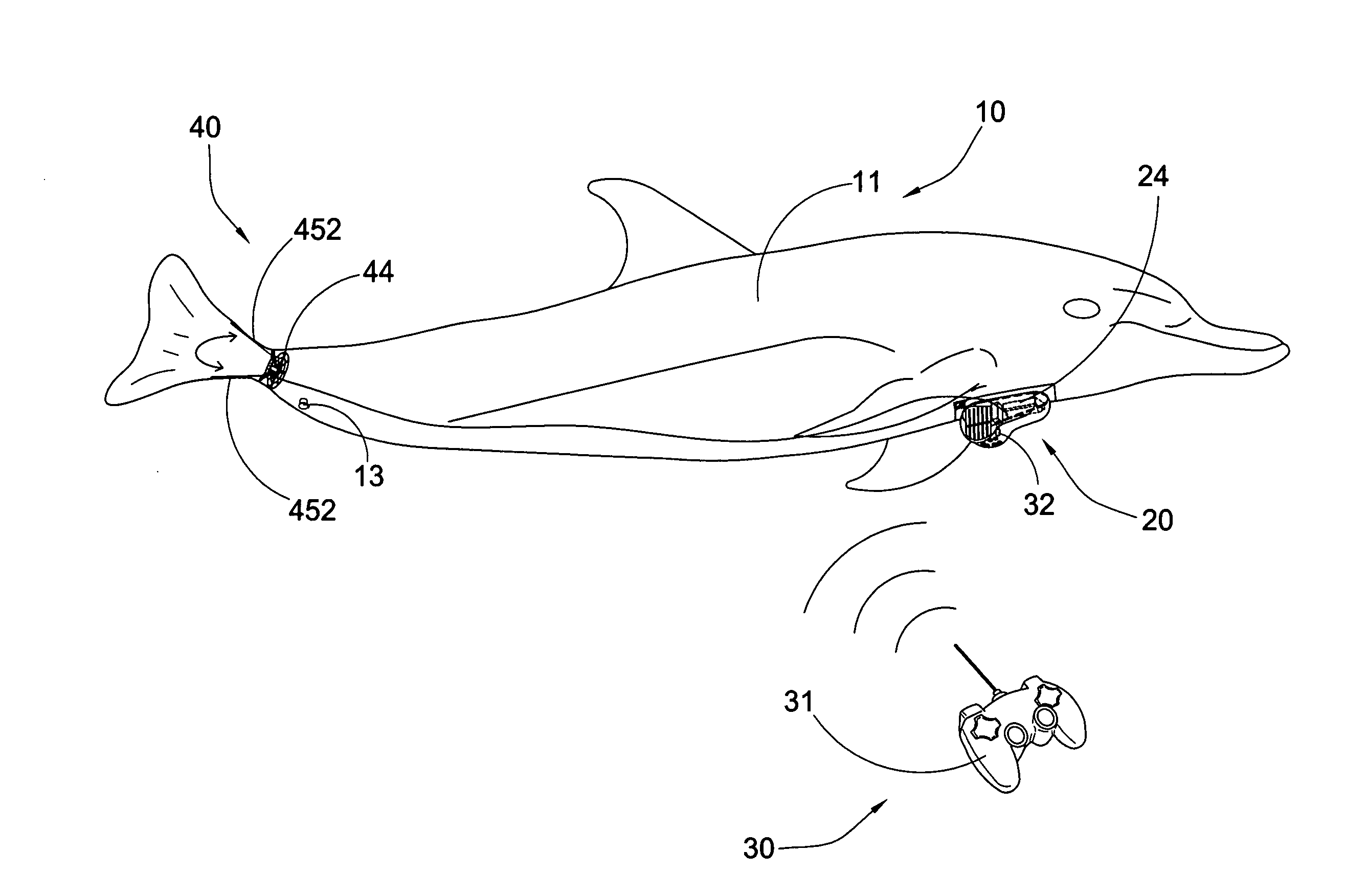
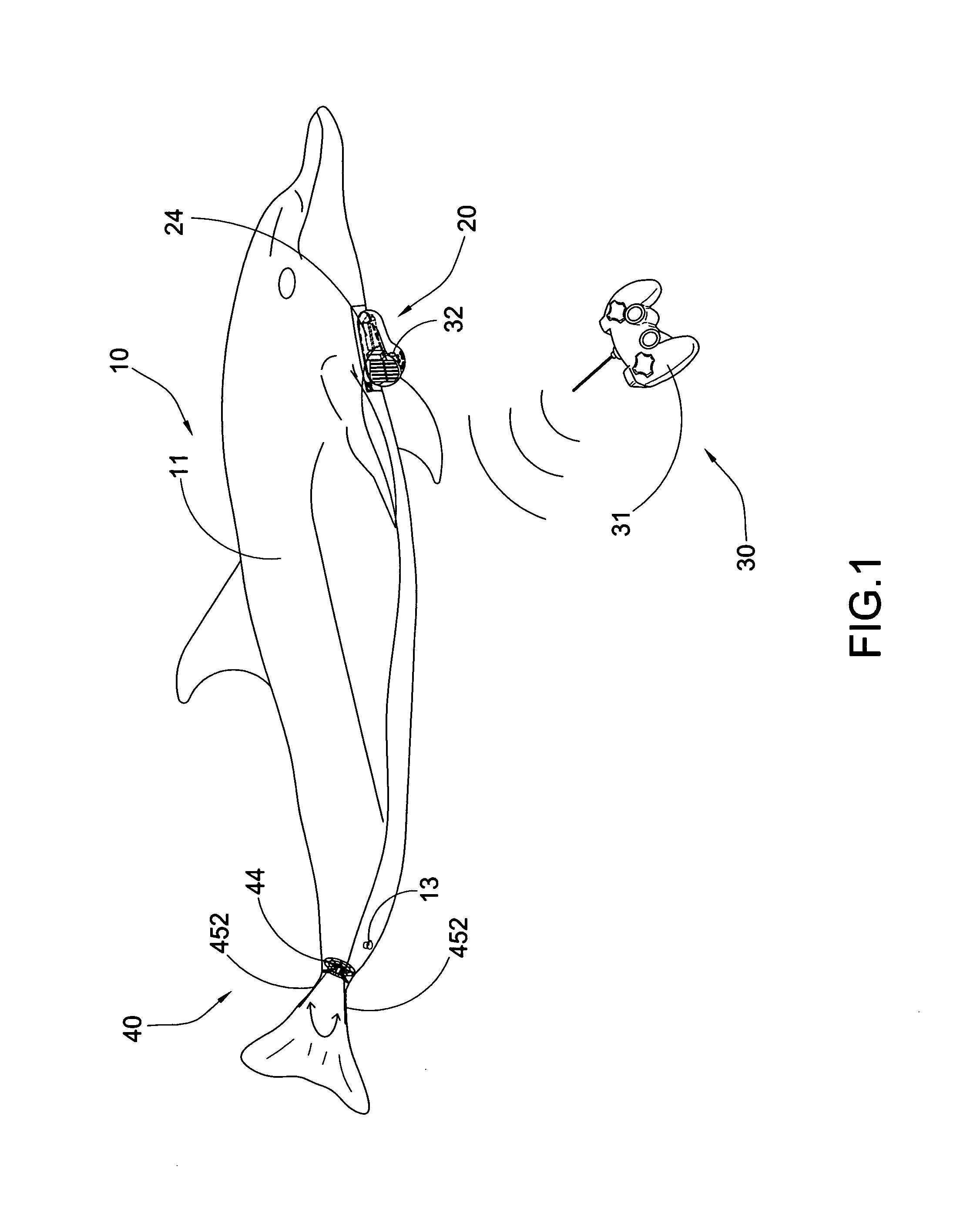
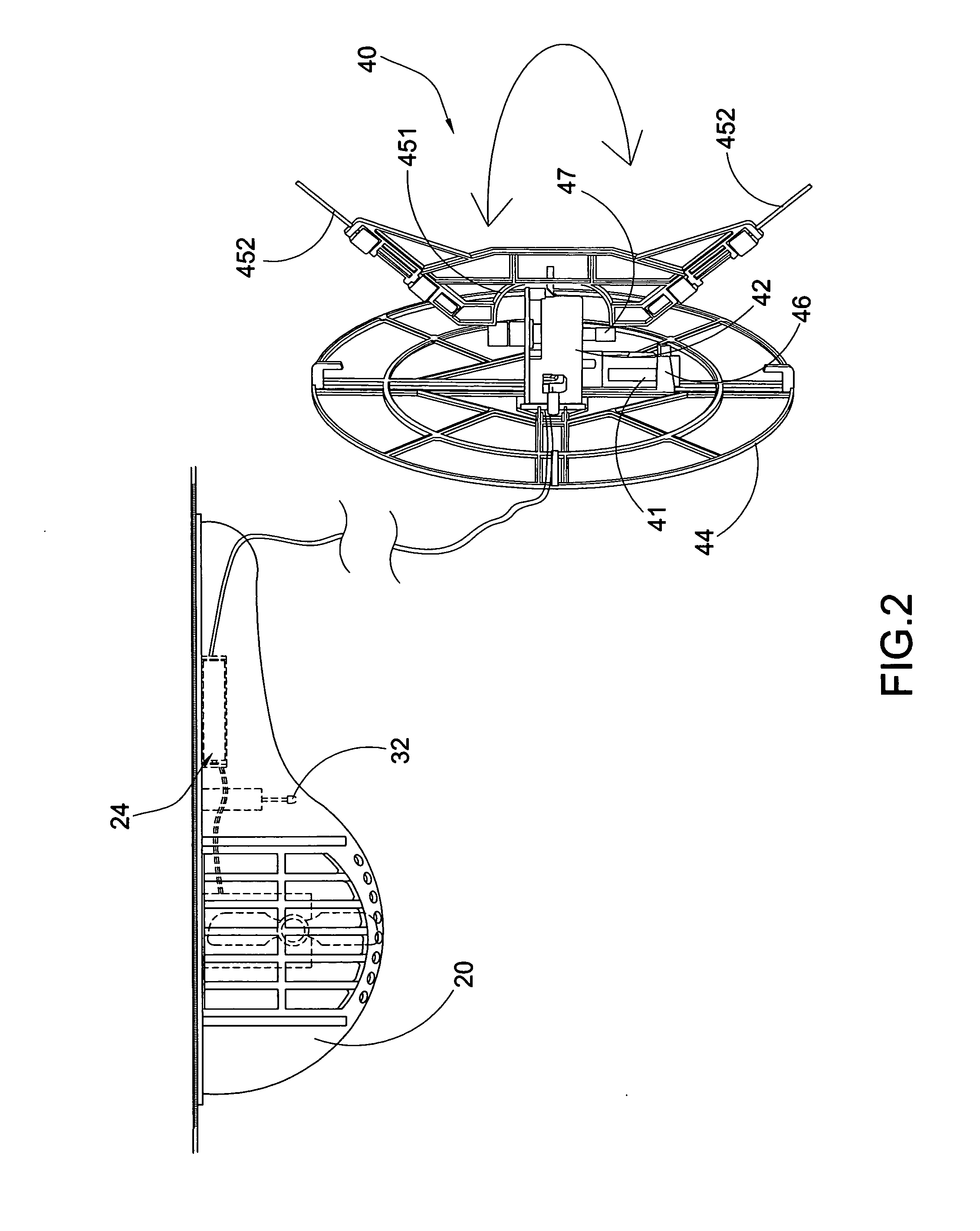
[0027]Referring to FIGS. 1 to 3 of the drawings, an air swimming toy according to a preferred embodiment of the present invention is illustrated, wherein the air swimming toy comprises a toy body 10, a driving device 20, a remote controller 30, and a steering device 40.
[0028]The toy body 10 comprises a floating body 11 and a tail body 12 movably coupled with the floating body 11, wherein the floating body 11 is filled with a particular gas, such as helium, in order to float in the air. In particular, the toy body 10 further comprises a valve 13 provided at the floating body 11 for filling the gas thereinto. The floating body 11 is made of high quality, durable nylon material that will stay inflated for a relatively long period of time, such as a week. The gas can be refilled to the floating body 11 via the valve 13 to inflate the floating body 11.
[0029]Accordingly, when the tail body 12 is moved in a wiggling motion, the toy body 10 will move forward slowly and smoothly as the swimm...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



