

Handshake legged mobile robot control system
a mobile robot and control system technology, applied in the direction of electric programme control, program control, instruments, etc., can solve the problems of affecting the external force applied by handshaking may well be strong enough to disturb the posture of the legged mobile robot's posture is liable to be destabilized, so as to improve communication capability and stable postur
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018]A legged mobile robot control system according to an embodiment of this invention will be explained with reference to the attached drawings in the following.
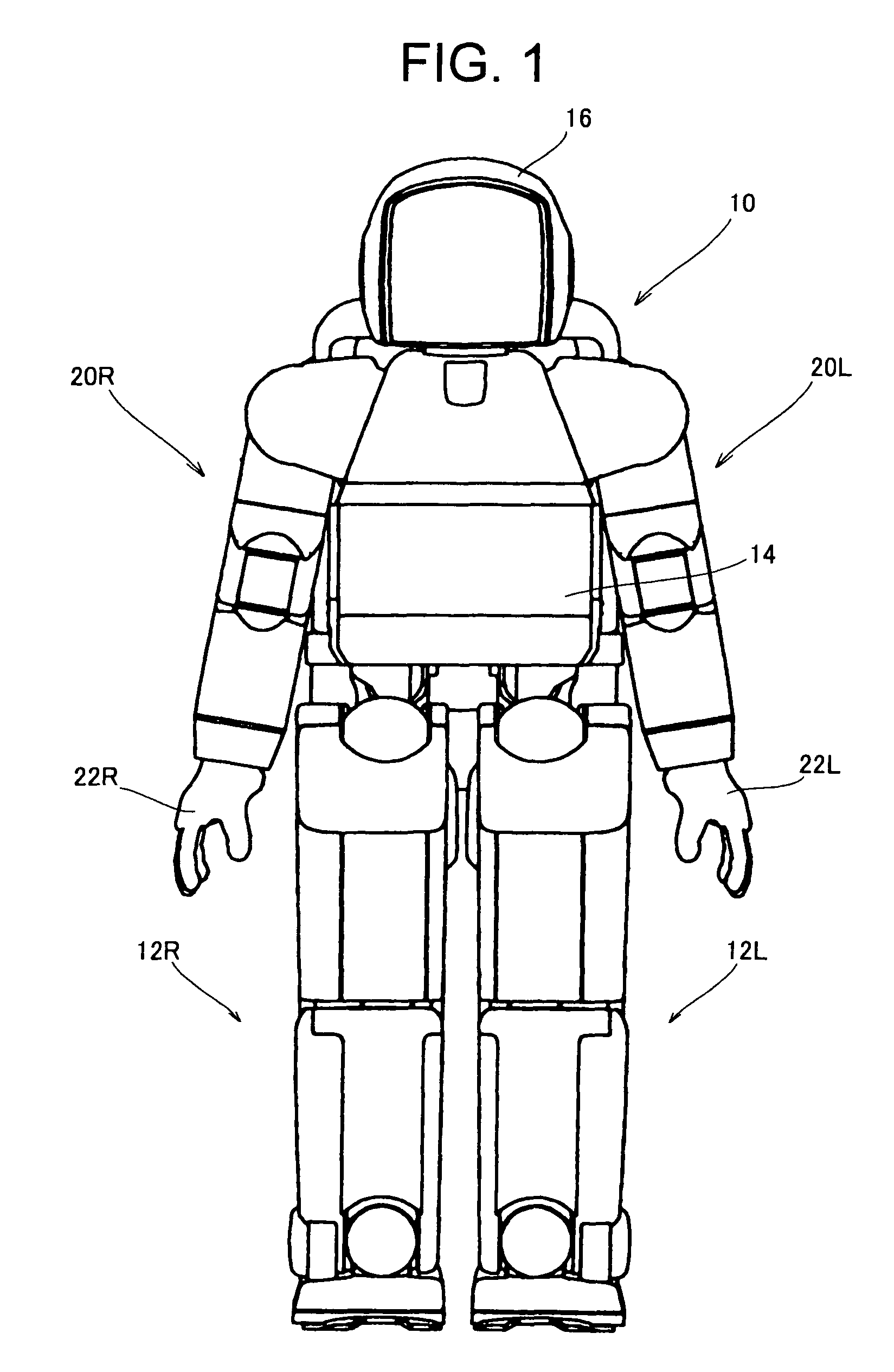
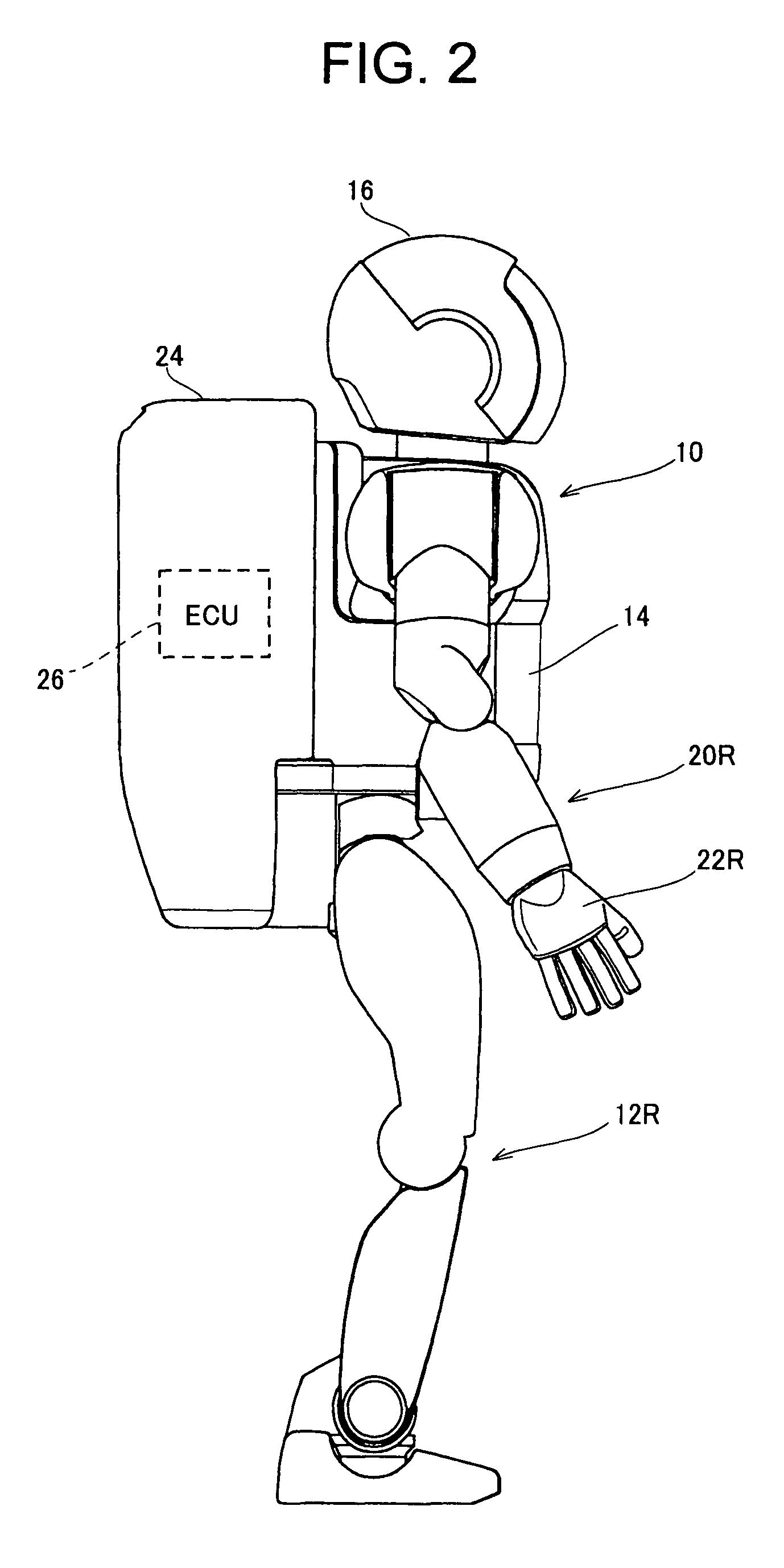
[0019]FIG. 1 is a front view of a robot, specifically a legged mobile robot, for which the control system according to an embodiment of this invention is applied and FIG. 2 is a side view of the robot shown in FIG. 1. A biped humanoid robot having two legs and two arms is taken here as an example of a legged mobile robot.
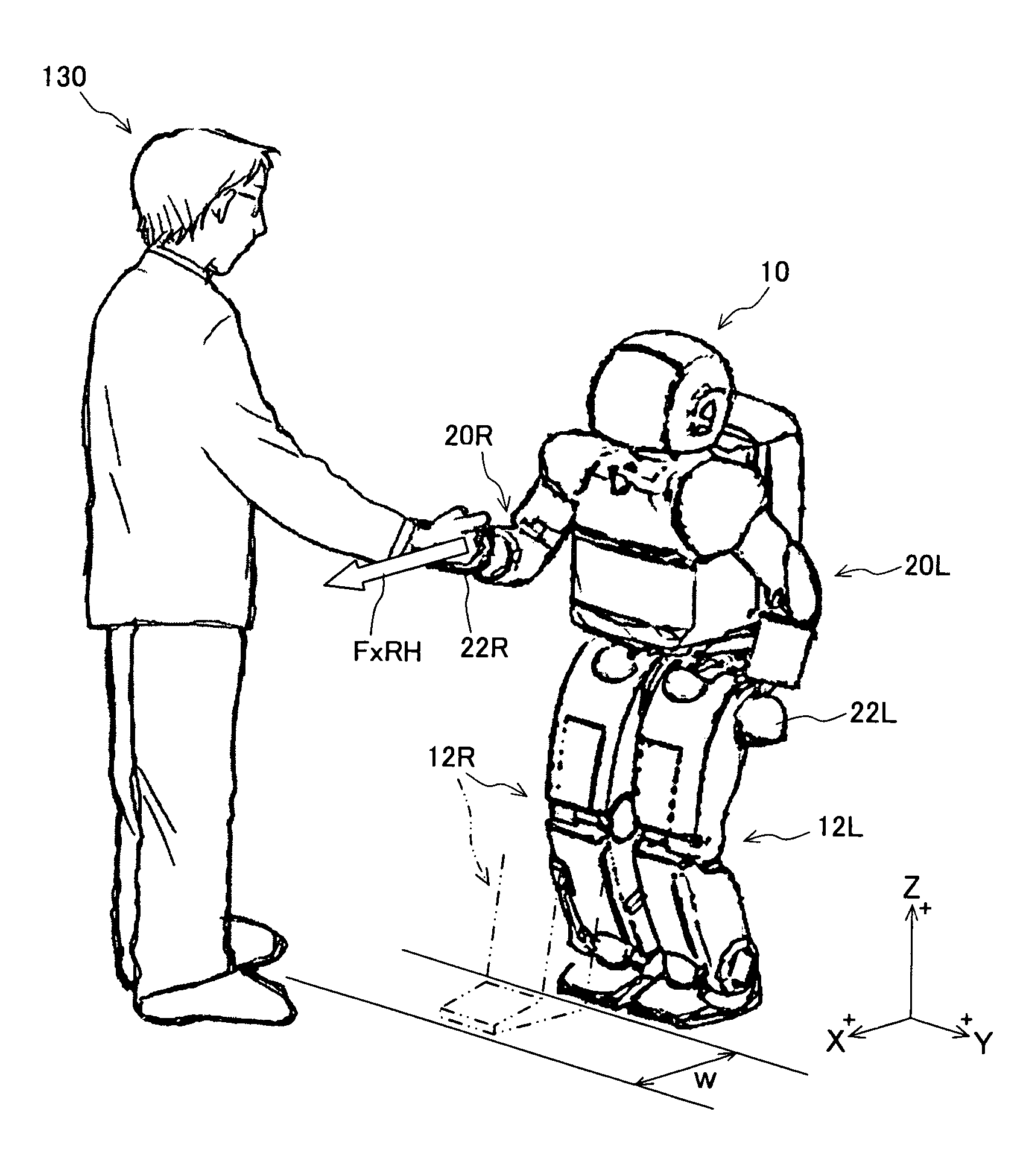
[0020]As shown in FIG. 1, a legged mobile robot (hereinafter called simply “robot”) 10 is equipped with right and left legs 12R, 12L (R and L indicating the right and left sides; hereinafter the same) that are connected to the lower portion of a body 14. A head 16 is connected to the body 14 at its upper portion and right and left arms 20R, 20L are connected one to either side of the body 14. Hands (end effectors) 22R, 22L are attached to the distal ends of the arms 20R, 20L. A housing unit 24 is mounted o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More