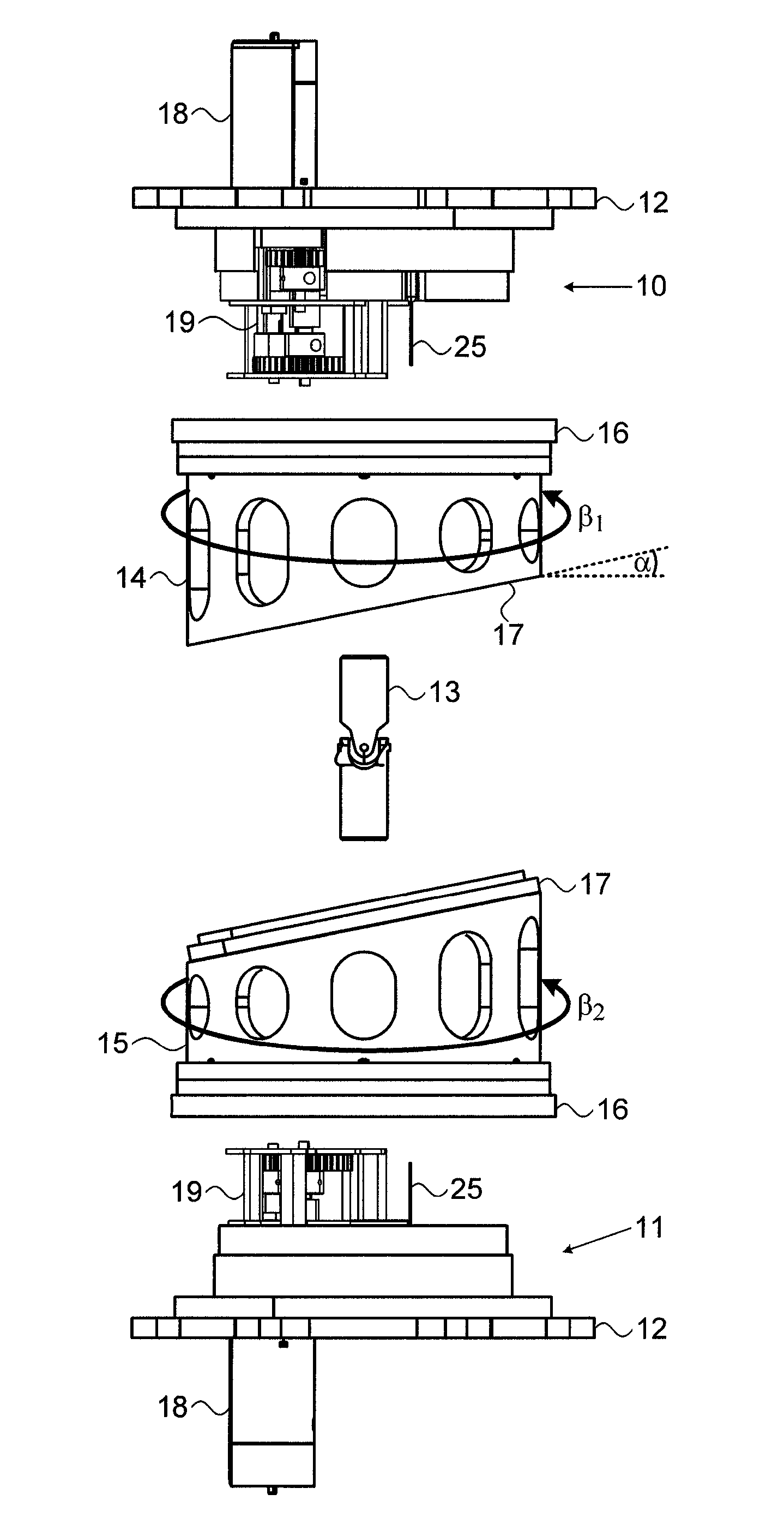
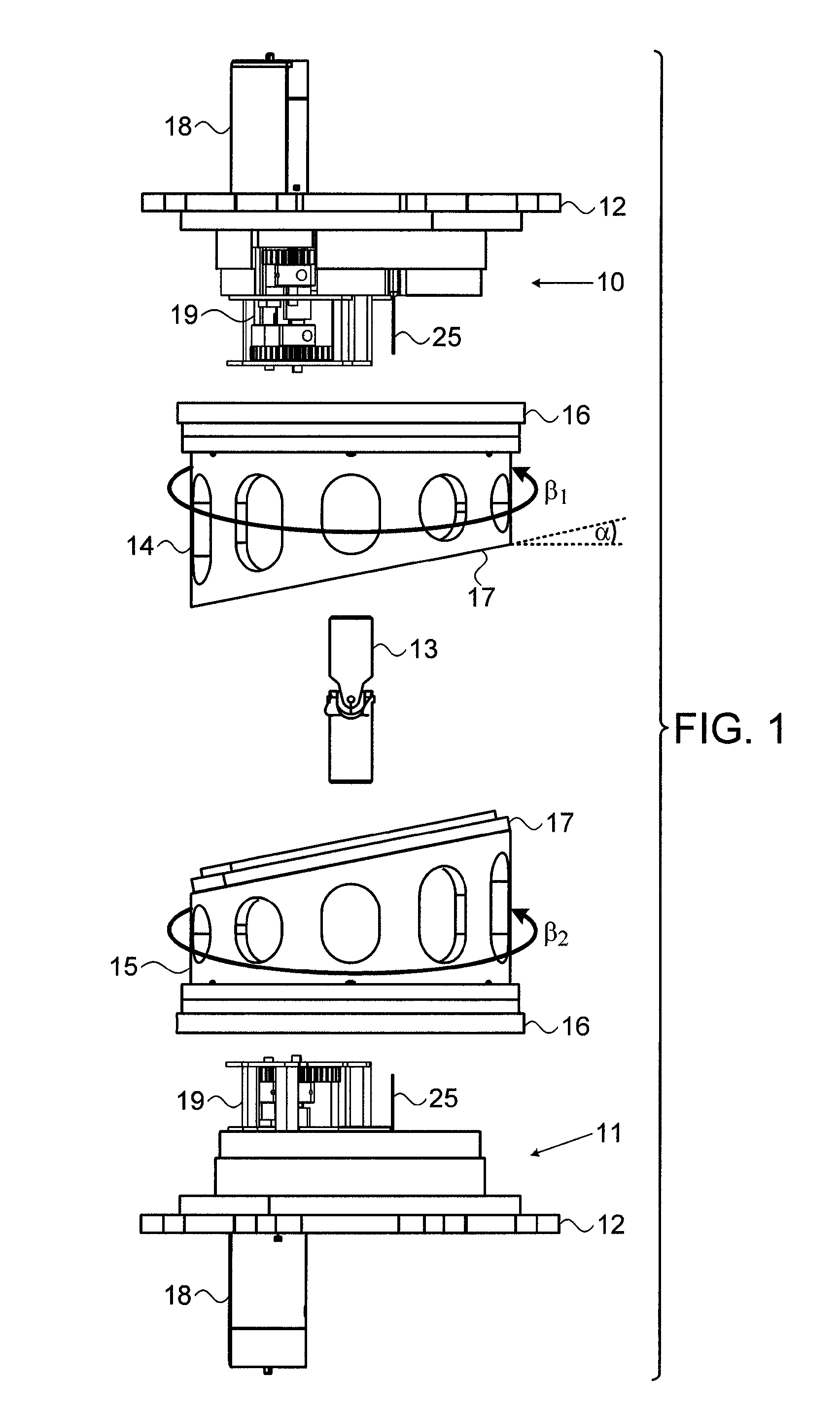
[0009]The two cylinders can be rotated relative to the base elements of the link mechanism using motors driven directly onto the cylinders, or through an external gear. Relative rotation between the two cylinders results in a change of the inclination angle between the axial centerlines of the upper and lower cylinders as they rotate. On the other hand, simultaneous synchronized rotation of both cylinders in the same direction and at the same speed, causes them to act as a single solid unit, such that the inclined link mechanism rotates around the axis through one of the cylinders, with the other axis inclined at the angle at which the output platform is oriented relative to the base. Consequently, the azimuthal orientation of the inclination of the link mechanism can be rotated 0-360° in space. A combination of both of these rotation modes provides the ability to amend the pose of the robotic link mechanism within the envelope made available by the angle of inclination of the two cylinders. Thus, the inclination angle of the link mechanism is achieved by rotating one the cylinder with respect to the other while the orientation of the inclined cylinder is achieved by a synchronized rotation of both cylinders.
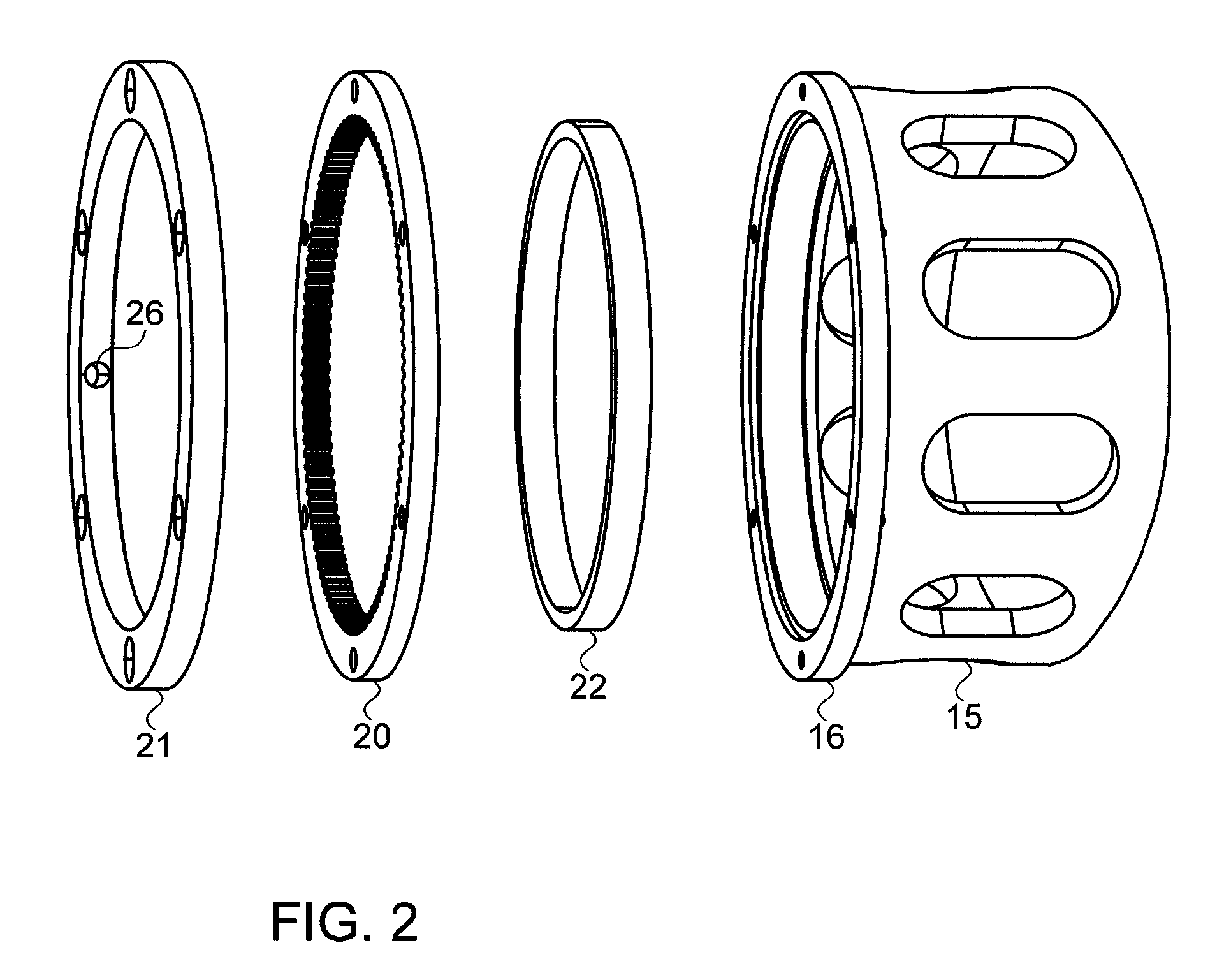
[0011]The function of the flexible passive joint between the base elements is to hold the base elements together and prevent mutual rotation of the base elements, while allowing the cylinders captured between them to change their mutual orientations. Further implementations of the robotic link mechanism of the present disclosure can achieve this aim by externally clamping the cylinders rotatably to the base elements and the cylinders to each other. This can be achieved by the use of clamping rings mounted on lip-like flanges formed at the ends of the cylinders and on the base elements, such that they clamp adjacent lips together, preventing their separation, but allowing them to mutually rotate. Thus, the cylinders can be attached to their base elements and the cylinders to each other, without impeding their relative rotation. An additional element must be provided to prevent the base elements from rotating relative to each other. These embodiments have the advantage of leaving a large clear passageway along the axis of the device, such as could be useful for many industrial and medical applications.
[0012]The only rotating parts of the link mechanism are the inclined cylinders, while the base elements of the device are fixed, and act as supports for the rotation motors and associated gears. This kinematic arrangement results in a backbone composed of a passive universal joint, (at least for those implementations that incorporating the centrally located universal joint) which is supported and actuated by the cylindrical structure that serves as an active exoskeleton. Consequently, this mechanical design can withstand high bending and twisting torques because bending torques resulting from self-weight and external loads are handled by the exoskeleton structure, at the inclined plane connecting the two cylinders and at the contact planes of the cylinders with the mechanism base elements. These cylindrical elements have substantial stiffness against bending or distortion.
[0015](i) the rotation of the cylinders using the motors needs only to overcome the sliding frictional forces, which are lower by approximately one order of magnitude (the coefficient of friction) than the gravitational forces resulting from the weight of a sturdy long arm and its payload, which are handled in this device by the exoskeleton structure, and(ii) the exoskeleton structure, which handles the self weight of the entire arm and payload, can have a much higher stiffness / weight ratio than a conventional articulated arm.
[0018]In such a mechanism, the passive flexible joint should be connected to the base elements such that it prevents the base elements from separating, thereby confining the first and second cylinders between the base elements. Additionally, the motors should be adapted to generate relative rotation between the two cylinders, such that the axes of the cylinders undergo mutual change in inclination as the cylinders rotate relative to each other. In such mechanisms, a combination of rotation modes of the cylinders thus enables adjustment of the pose of one of the base elements relative the other, within the envelope made available by the angles of inclination of the obliquely formed end surfaces of the two cylinders. Furthermore, rotation of one of the cylinders with respect to the other defines a combination of the inclination and the azimuthal orientation of one of the cylinder axes relative to the other.
[0022]According to further exemplary implementations, the passive flexible joint connecting the first and second base elements may be any one of a mechanical universal joint, a flexible shaft, a spiral spring element, and a pair of half-shafts connected by a flexible polymer central section. Alternatively, it may be an inverted universal joint assembly external to the axis of the cylinders, such that the axis can be free of impediments.



 Login to View More
Login to View More  Login to View More
Login to View More