Robot shoulder joint
A technology of robot shoulders and joints, applied in the field of robots, can solve the problems of high manufacturing cost and poor craftsmanship
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
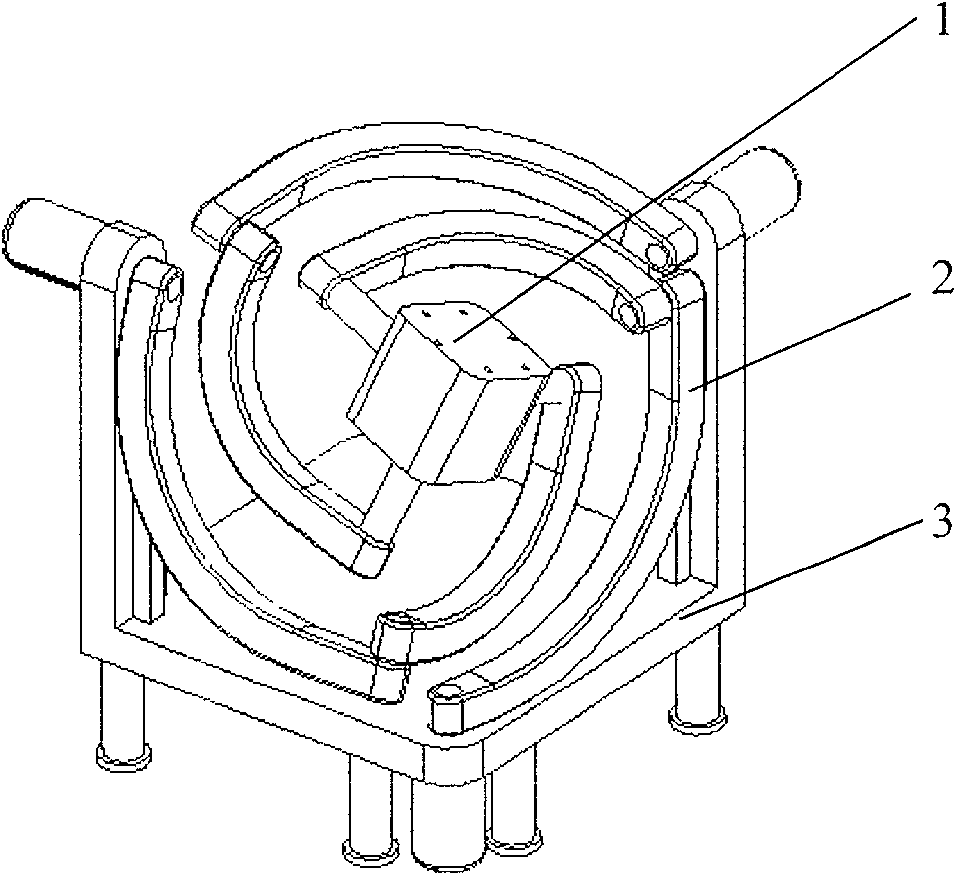
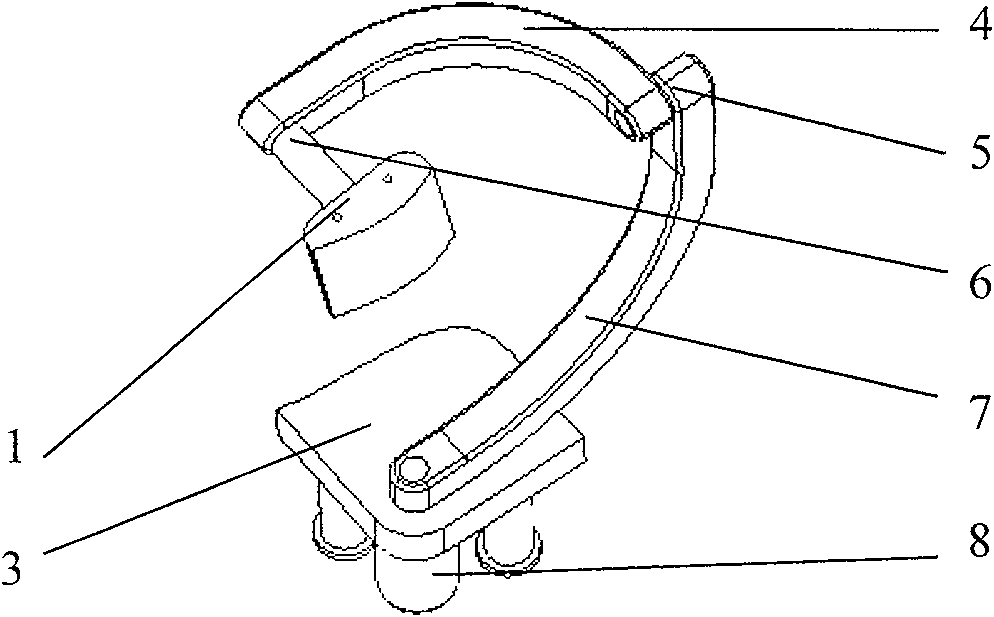
[0008] figure 1 It is an embodiment disclosed by the present invention. This robot shoulder joint mainly includes a motion platform 1 , a base 3 and three identical motion branch chains 2 and the like. The motion branch chain 2 is composed of a servo motor 8, a driving rod 7 and a driven rod 4, etc., wherein one end of the driving rod 7 is fixedly connected with the rotating shaft of the servo motor 8 through a mounting hole, and the other end of the driving rod 7 is connected through a first rotation. The auxiliary hinge 5 is connected with one end of the driven rod 4, and the other end of the driven rod 4 is connected with the motion platform 1 through the second rotary secondary hinge 6, and the three driven rods 4 correspond to the three third connected with the motion platform 1. The shaft axes of the two rotating joint hinges 6 are respectively perpendicular to each other in space; the servo motors 8 are installed on the base 3 , and the three shaft axes of the three ser...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com