

Unmanned machine rolling leveling control method
A control method and unmanned aerial vehicle technology, applied in the direction of control start method, attitude control, automatic manipulation, etc., can solve the problems of impact, unfavorable aircraft safe landing, etc., achieve the effect of simple and reliable control process, and improve landing safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
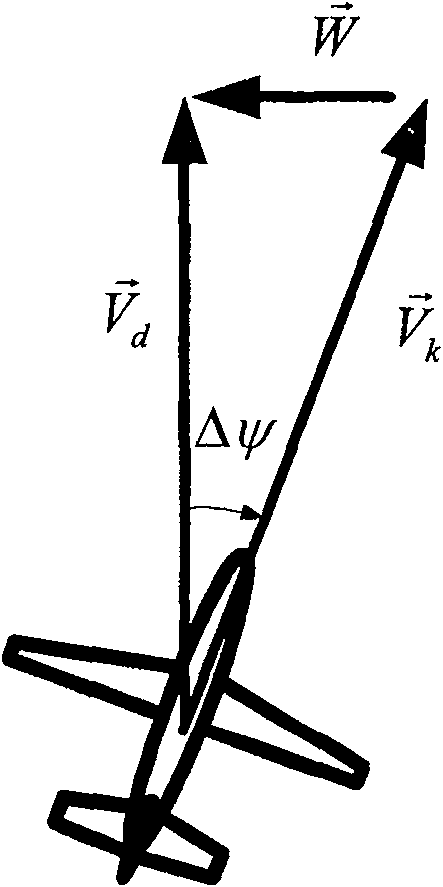
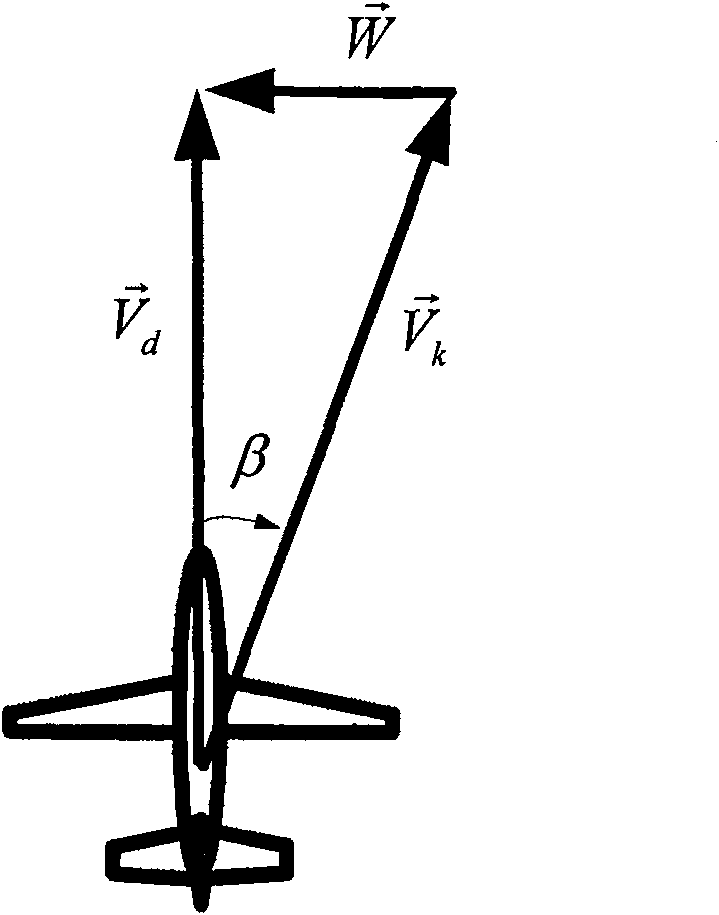
[0042] In this example, the sideslip correction method is used for lateral control during the UAV’s descent phase, and a constant positive crosswind of 3m / s is added to the simulation process. When the roll leveling control is switched on, the control method in formula (7) mentioned in the background technology is directly used and the roll leveling control method provided by the present invention is used for comparison and description.
[0043] The control method in formula (7) is:
[0044] δ x = K γ γ + K ω x ω x
[0045] In this example, K γ = 1.5, K ω x = 0.2 . Such as Figure 3a , 3b As shown, in the simulation, the roll and leveling control is started at 1892.6 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More