

Biological fusion type foot joint rehabilitation robot
A technology for rehabilitation robots and foot joints, which is used in manipulators, gymnastics equipment, physical therapy, etc., can solve problems such as poor safety, poor efficacy, and few degrees of freedom, and achieve the effects of good adaptation, simple and novel structure, and flexible movement.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
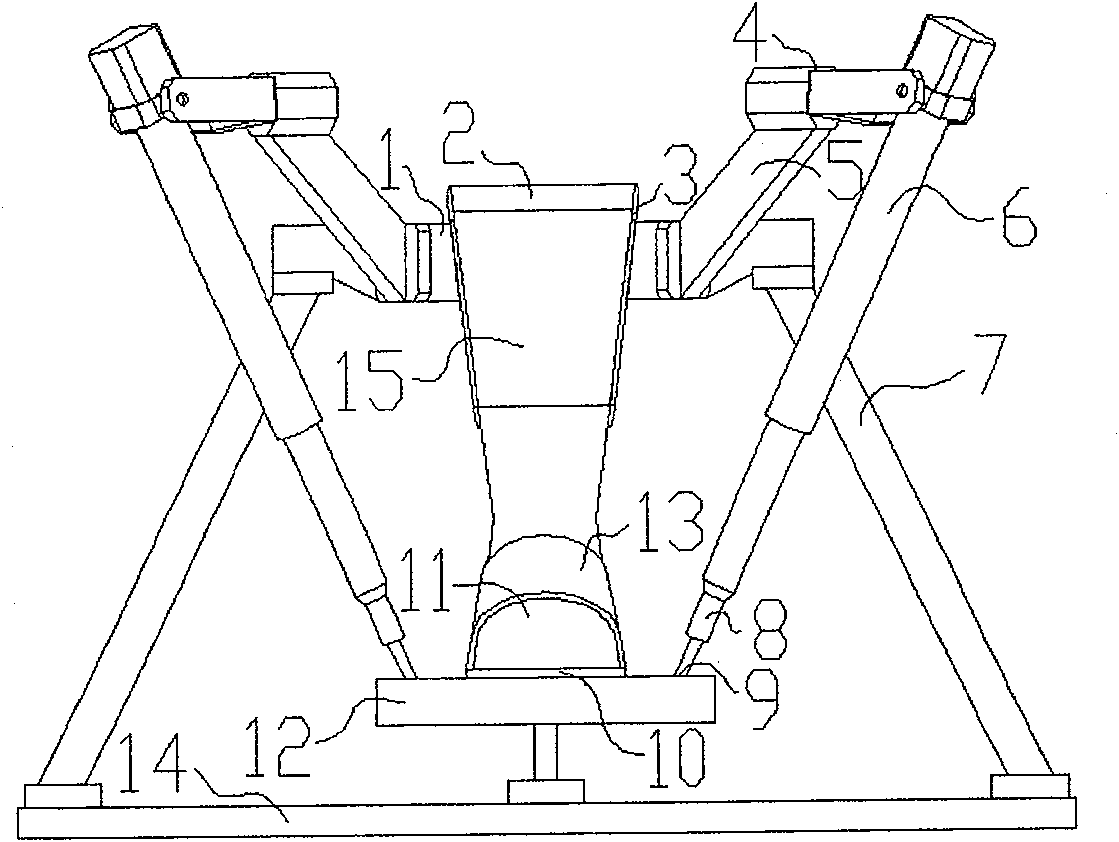
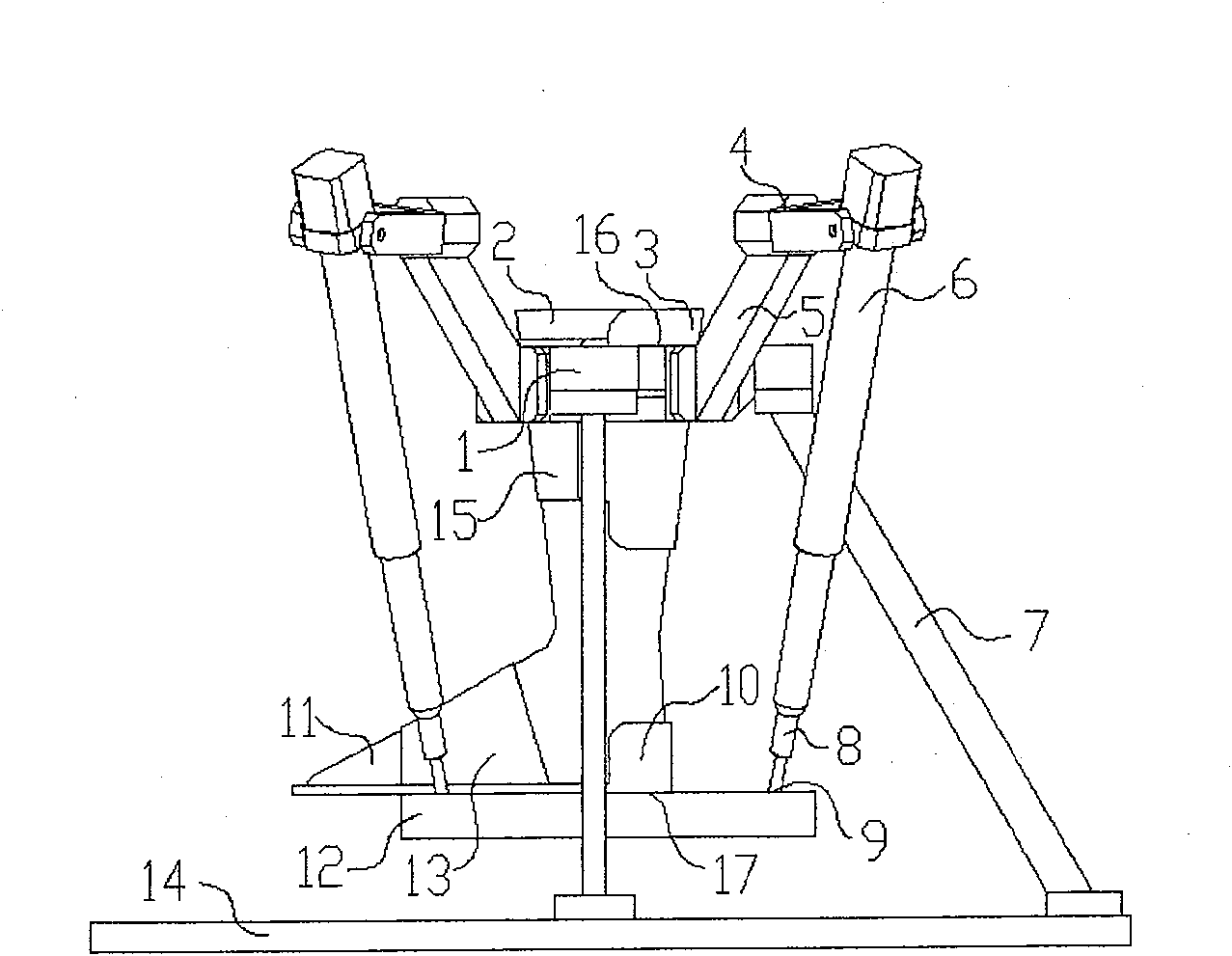
[0027] figure 1 It is an embodiment disclosed by the present invention. The upper ends of the four linear drive units are connected to the upper platform mounting bracket 5 through the U pair (universal hinge) 4, and the lower ends are connected to the lower platform 17 through the S pair (spherical hinge) 9, and the human feet 11 are fixed to the lower platform 17 through the clamp. Joint, shank 2 links to each other with upper platform 16 by shank fixer. The hasp II 15 is fixedly connected with the fixed plate 3 , and the four mounting brackets 5 and the fixed plate 3 are fixedly connected to the mounting platform 1 to form an upper platform 16 . After the rear part of the lower leg is put into the fixing plate, the lower leg is fixed to the upper platform 16 by the hasp 13 at the front part. Hasp I 13 is fixedly installed with pedal 10, and pedal 10 is fixedly connected on platform 12 and forms lower platform 17. The sole of the people's feet is put into the pedal 10, an...
Embodiment 2
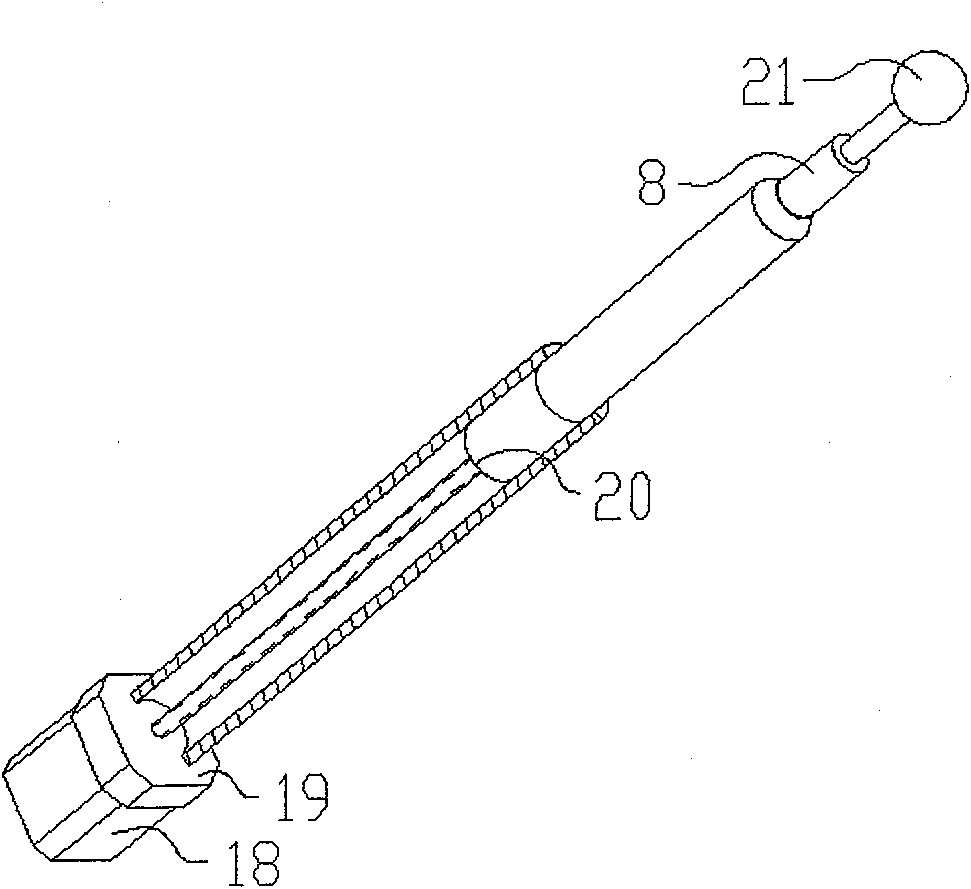
[0029] Figure 6 It is the second embodiment of the present invention. Replace the linear driver in Example 1 with a two-way motion cylinder 22. The two-way motion cylinder 22 is composed of a cylinder body and a plunger rod. The elastic coupling unit 8 is connected in series with the plunger rod. The upper end of the elastic coupling unit 8 is connected to the ball pair. Cooperating ball head 21 . The connection mode between the two-way motion cylinder 22 and the mechanical system of the robot is the same as that in Embodiment 1. The air source 24 supplies air to the cylinder through the pipeline 25 to realize the reciprocating motion of the linear drive unit.
Embodiment 3
[0031] Figure 7 It is the third embodiment of the present invention. The linear driver in Example 1 is replaced by an electric cylinder 23. The electric cylinder 23 is composed of a cylinder body and a rod. The elastic coupling unit 8 is connected in series with the rod. The upper end of the elastic coupling unit 8 is a ball head that matches the ball pair. 21. The connection mode between the electric cylinder 23 and the mechanical system of the robot is the same as that in Embodiment 1. The reciprocating motion of the linear drive unit is achieved by applying power to the electric cylinder.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More