

Spatial mechanism in three degrees of freedom in use for parallel-connected moving devices
A degree of freedom and parallel technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0008] The technology of the present invention will be further described below by means of accompanying drawings and examples.
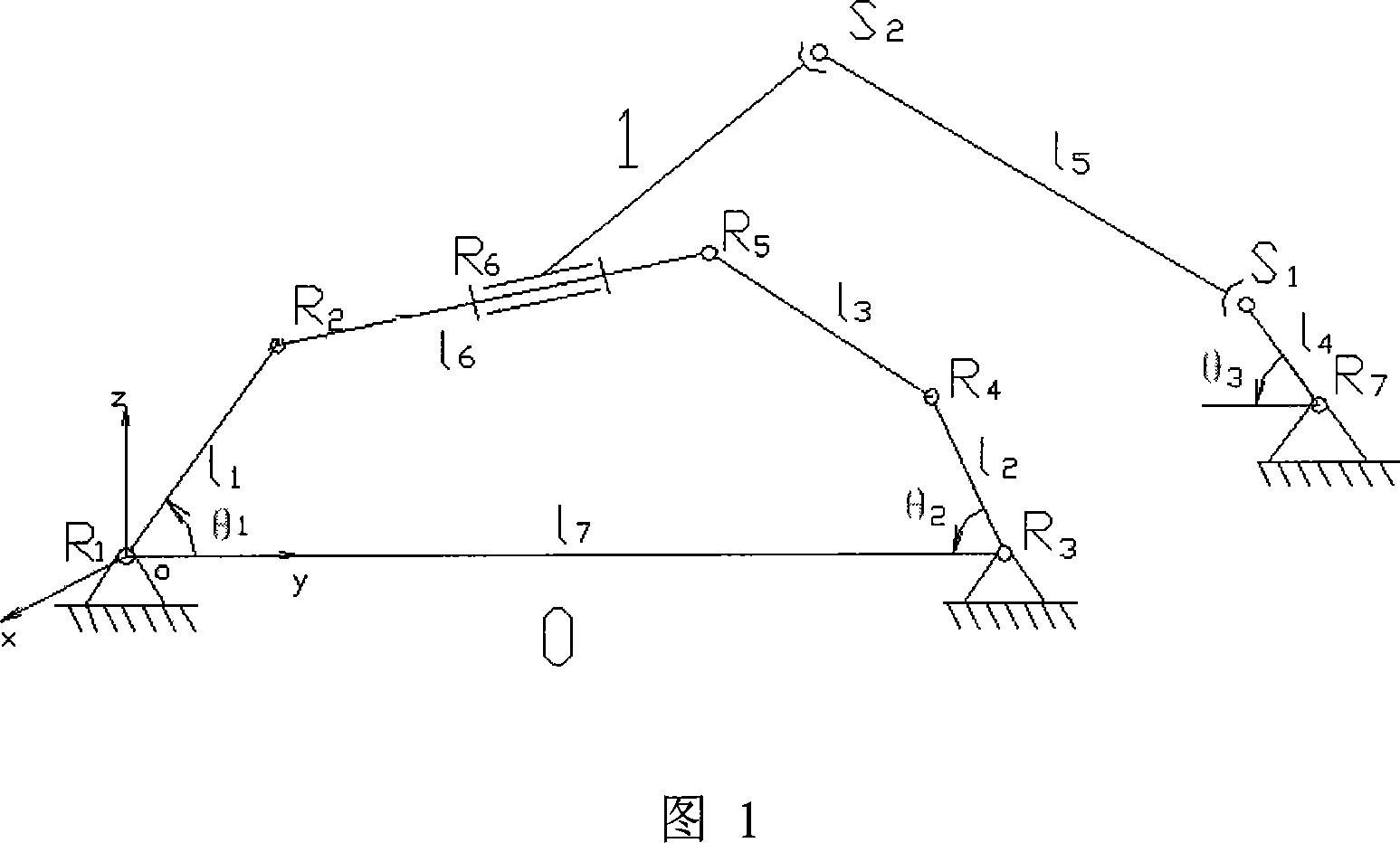
[0009] Accompanying drawing 1 is the structural representation of the present invention. It consists of a dynamic platform 1, a static platform 0, a generalized branch and a general branch. The generalized branch is composed of a rotating pair R with five single degrees of freedom. 1 , R 2 , R 5 , R 4 , R 3 The connecting rod of the two-degree-of-freedom planar five-bar mechanism is connected in series with a revolving pair R 6 , and the general branch consists of two spherical pairs S 2 , S 1 and a single-degree-of-freedom revolving joint R 7 formed in series; one end of the generalized branch and the moving platform 1 pass through the rotating pair R 6 Mechanically connected, the other two ends are connected to the static platform 0 through the rotating pair R 1 , R 3 Mechanical connection; one end of the general branch and the moving pla...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More