

AC position servo system interference observation and compensation method
A technology of servo system and compensation method, which is applied to controllers with specific characteristics, electric controllers, etc., can solve problems such as low-speed crawling, poor adaptability to load changes, weak anti-interference ability, etc., and achieve easy control, interference suppression, achieve simple effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
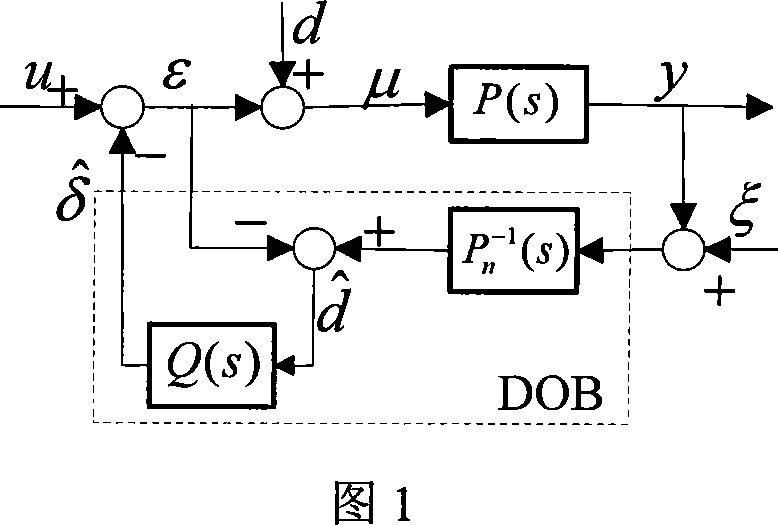
[0014] As shown in Figure 1, P(s) represents the actual system, P n (s) represents the nominal model, u is the external input of the system, d is the interference item, is the estimated value of d, ξ is the measurement noise, Q(s) is a low-pass filter whose relative order is greater than or equal to P n The relative order of (s). DOB applies the difference between the actual system output and the nominal model output as an equivalent disturbance to the nominal model. It estimates the equivalent disturbance and feeds it back to the input as a compensation signal.
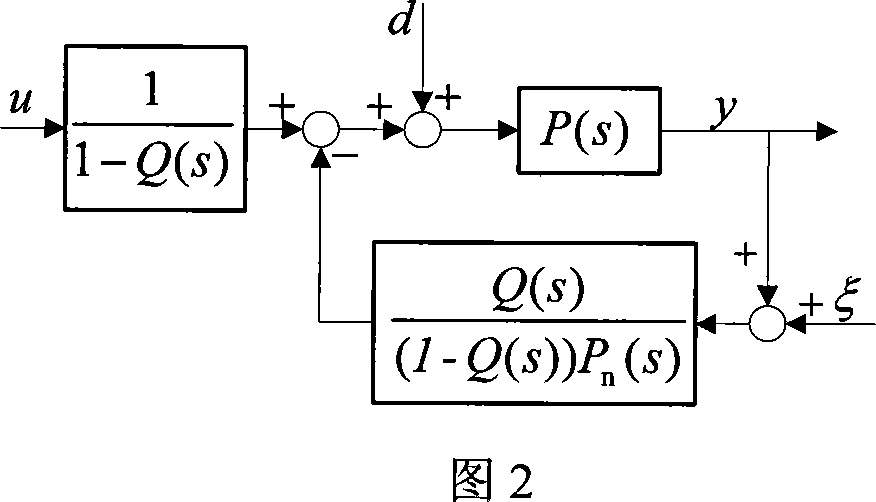
[0015] In order to understand the principle of the whole system based on the disturbance observer, we can first set Q(s)=1, get δ ^ = d ^ = ( 1 - P n ( s ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More