

Method for demarcating robot stretching hand and eye
A hand-eye calibration and robot technology, which is applied to manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of inability to capture extended hand images, difficult to guarantee calibration accuracy, and unsuitable for on-site calibration. Low, easy-to-operate effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
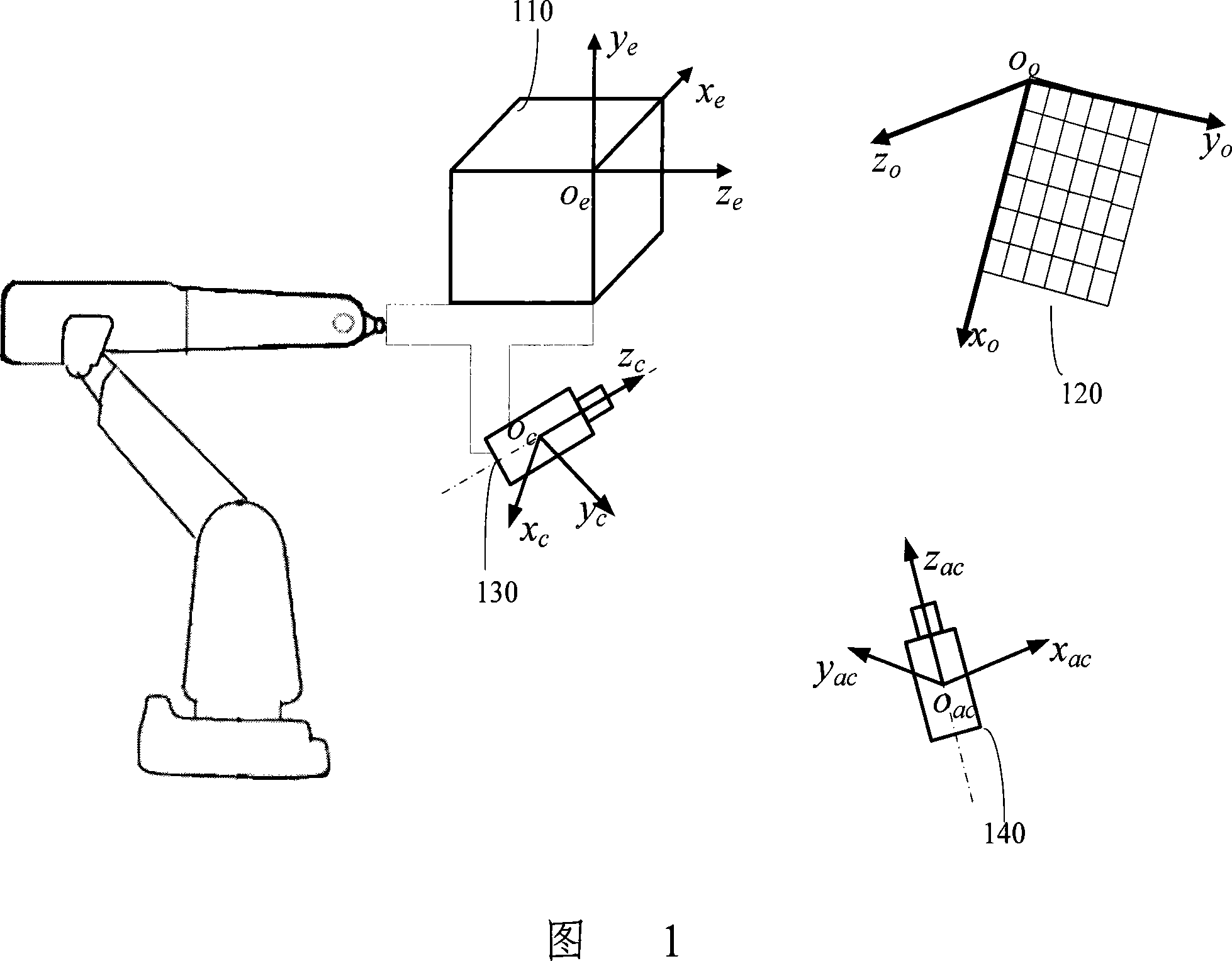
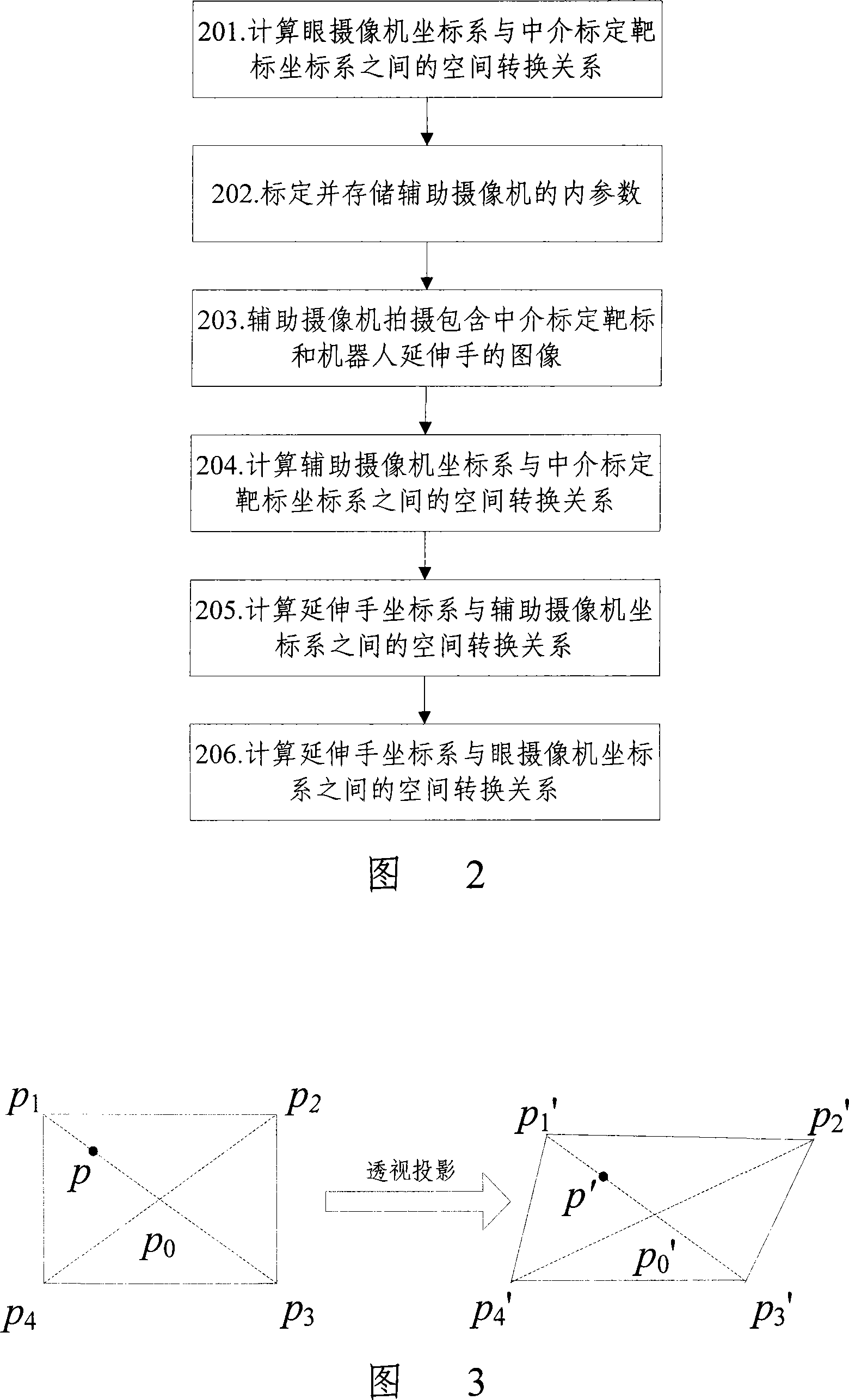
[0025] The basic idea of the present invention is: set the auxiliary camera; respectively calculate the spatial conversion relationship between the auxiliary camera coordinate system and the extended hand coordinate system and the auxiliary camera coordinate system and the intermediary target coordinate system; calculate the relationship between the eye camera coordinate system and the intermediary target coordinate system The spatial transformation relationship between them; then, according to the above-mentioned calculated spatial transformation relationship, the spatial transformation relationship between the eye camera coordinate system and the extended hand coordinate system is calculated, that is, the calibration of the extended hand-eye of the robot is realized.
[0026] The implementation of the robot extension hand-eye calibration method of the present invention will be described in detail below through specific embodiments in conjunction with the accompanying drawing...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More