

Rapid fine alignment method for SINS
A strapdown inertial navigation and fast technology, which is applied in directions such as navigation through velocity/acceleration measurement, and can solve the problems of difficult self-alignment of heading, low observation of azimuth misalignment angle, and poor azimuth misalignment angle estimation effect.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
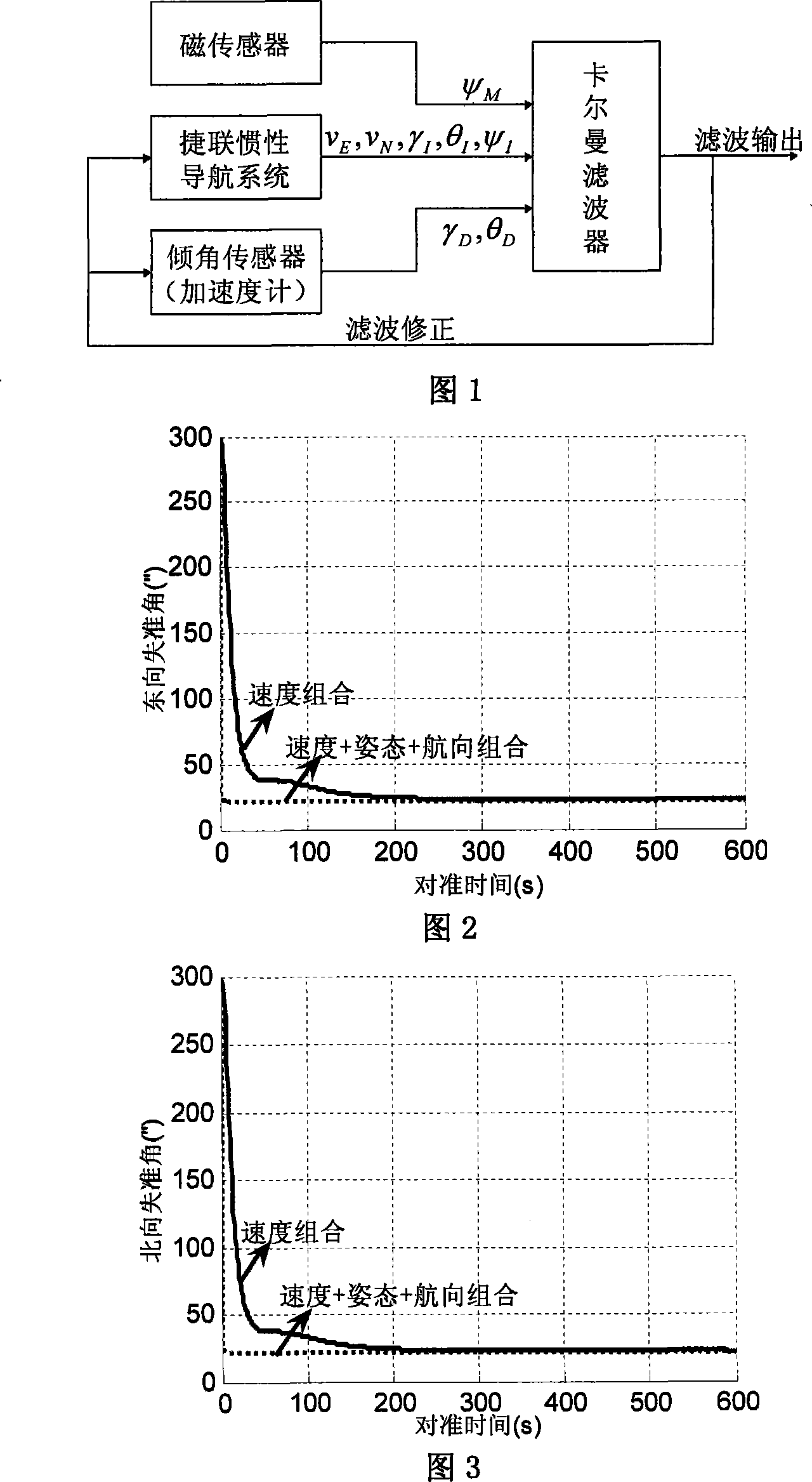
[0098] The fine alignment system of the present invention is shown in Figure 1. The main purpose is to improve the observability and observability of the traditional fine alignment method using velocity error as the observation, and avoid the multi-position alignment in the existing literature. In view of the problems of practicability and operability of the alignment method, a fine alignment method with low cost, good practicability, high precision and short alignment time is proposed for the low-cost strapdown inertial navigation system. Heading alignment of the integrated inertial navigation system. In order to achieve this goal, the following work needs to be done:
[0099](1) Inertial Measurement Unit (referred to as IMU) signal collection step: collect the output signal of the IMU at a certain sampling rate to obtain the angular velocity and specific force information of the carrier;
[0100] (2) Strapdown inertial navigation system analytical coarse alignment steps
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More