Collaborative detection method for multi-source image motive target
A collaborative detection and moving target technology, applied in image analysis, image data processing, instruments, etc., can solve the problem of low detection accuracy and achieve the effect of avoiding false detection and missed detection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
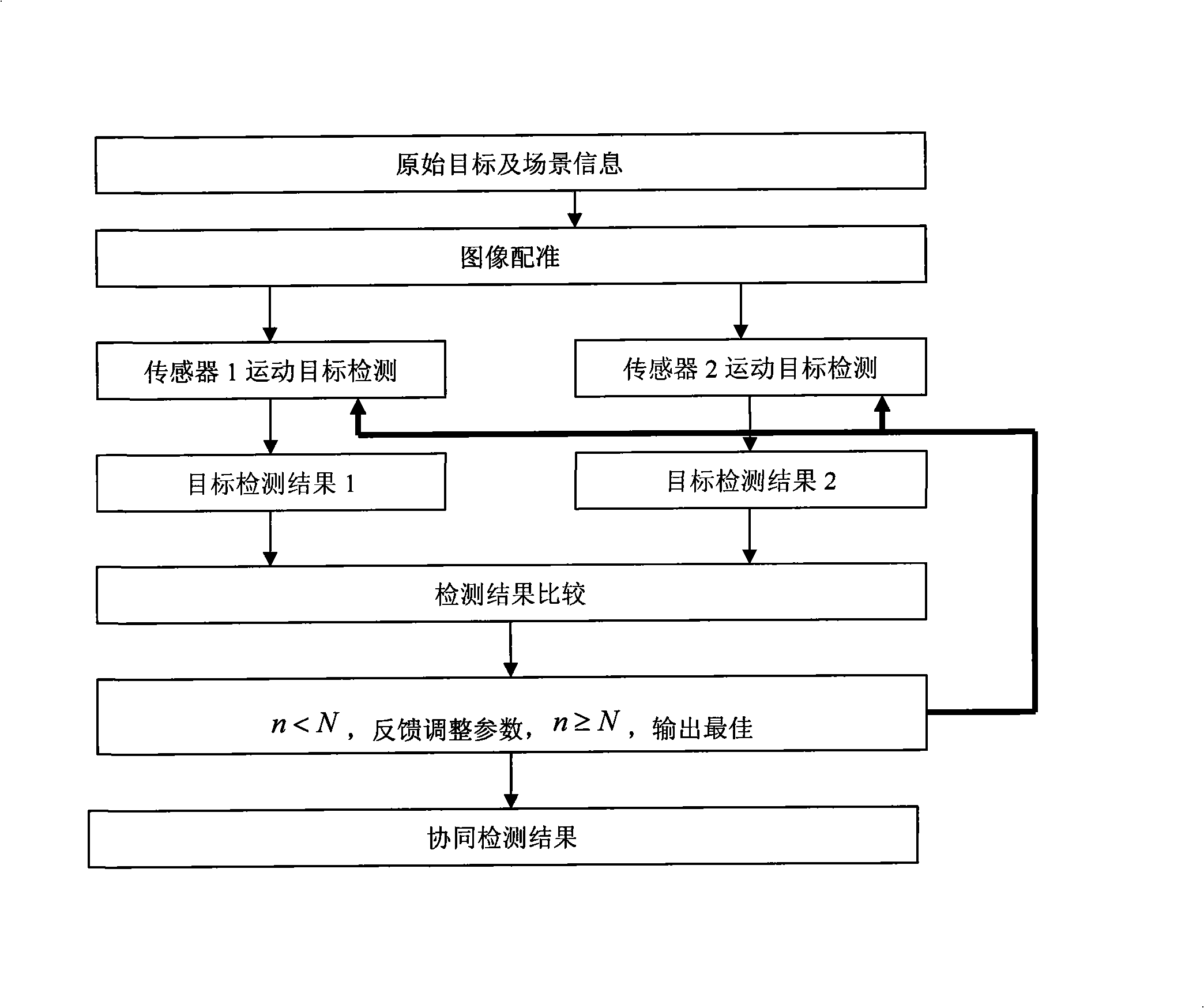
[0012] Refer to attached picture.
[0013] 1. Image registration.
[0014] Firstly, the general range of feature points is manually selected, and then the corner points within the range are used as feature points of the image, and the Harris factor is used to extract them.
[0015] Second, feature matching is performed. Feature point matching is divided into two steps, and the specific process is as follows:
[0016] 1. Rough matching of feature points.
[0017] Rough match is F 1 , F 2 In each feature point, a (2k+1)×(2k+1) template centered on the feature point is established. then choose F 1 A feature point in , and its template with F 2 Compare the templates of each control point in , and calculate the correlation between the two templates.
[0018] f 1 middle feature point (x i ,y i ) and F 2 middle feature point (x′ j ,y' j ) is calculated as follows:
[0019] cor ij = Σ ...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap