

Robot having arm in which umbilical member is accomodated
A robot and pipeline technology, applied in the field of robots, can solve problems such as the inertia of the wire feeding device and the balance of the arm structure that cannot be ruled out
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] Hereinafter, embodiments of the present invention will be described in detail with reference to the drawings. In the drawings, the same or similar structural elements are marked with common reference numerals.
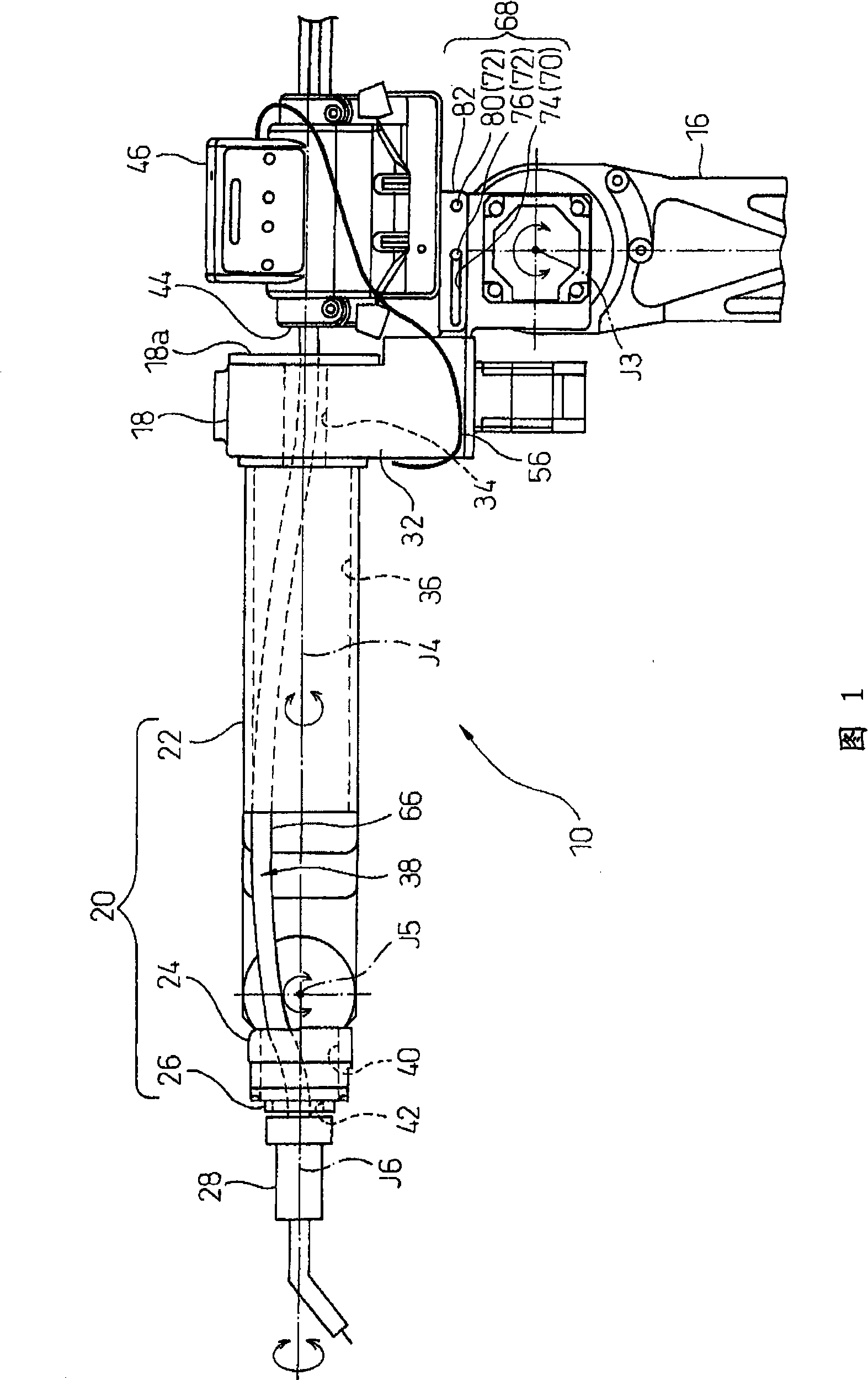
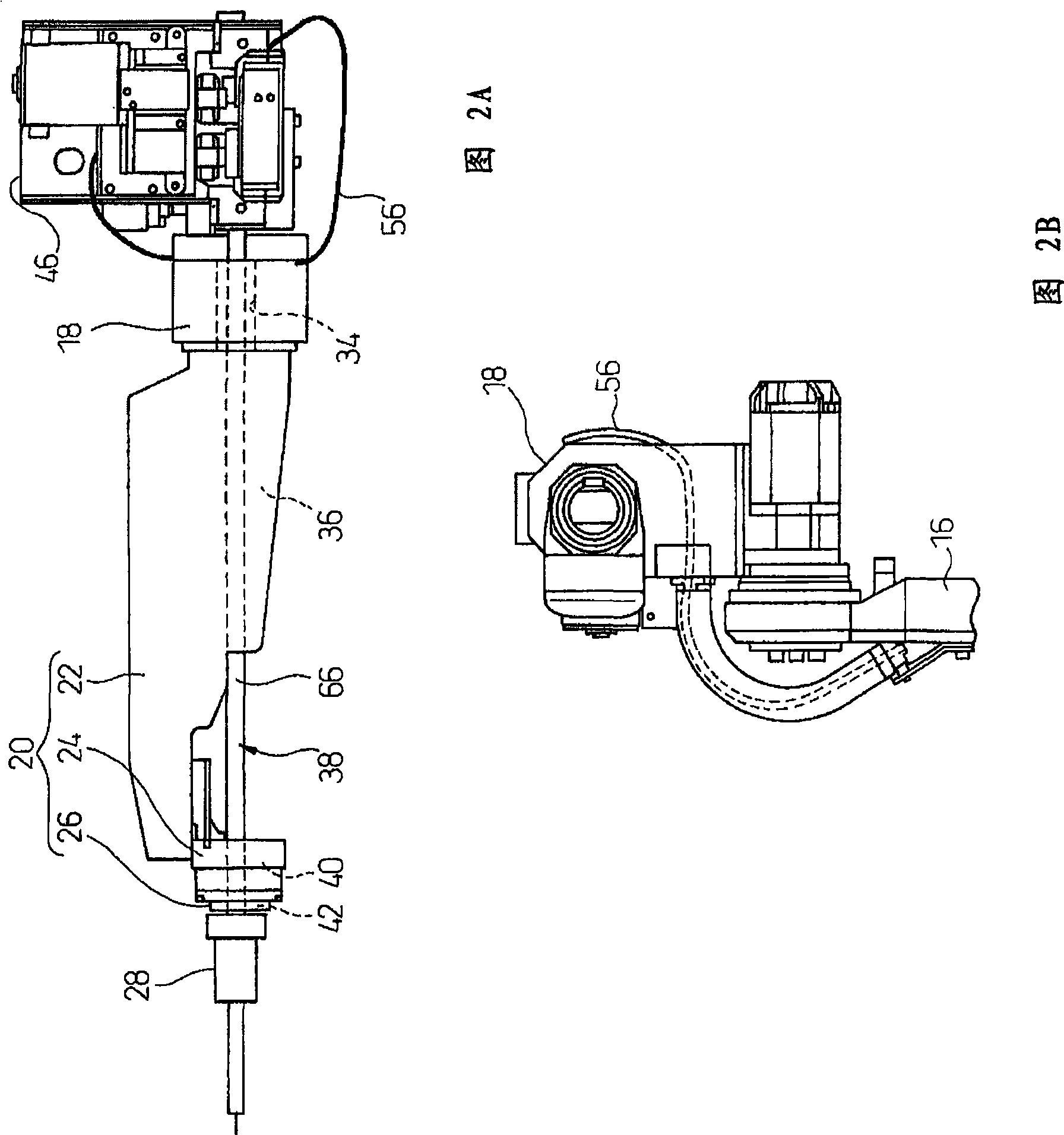
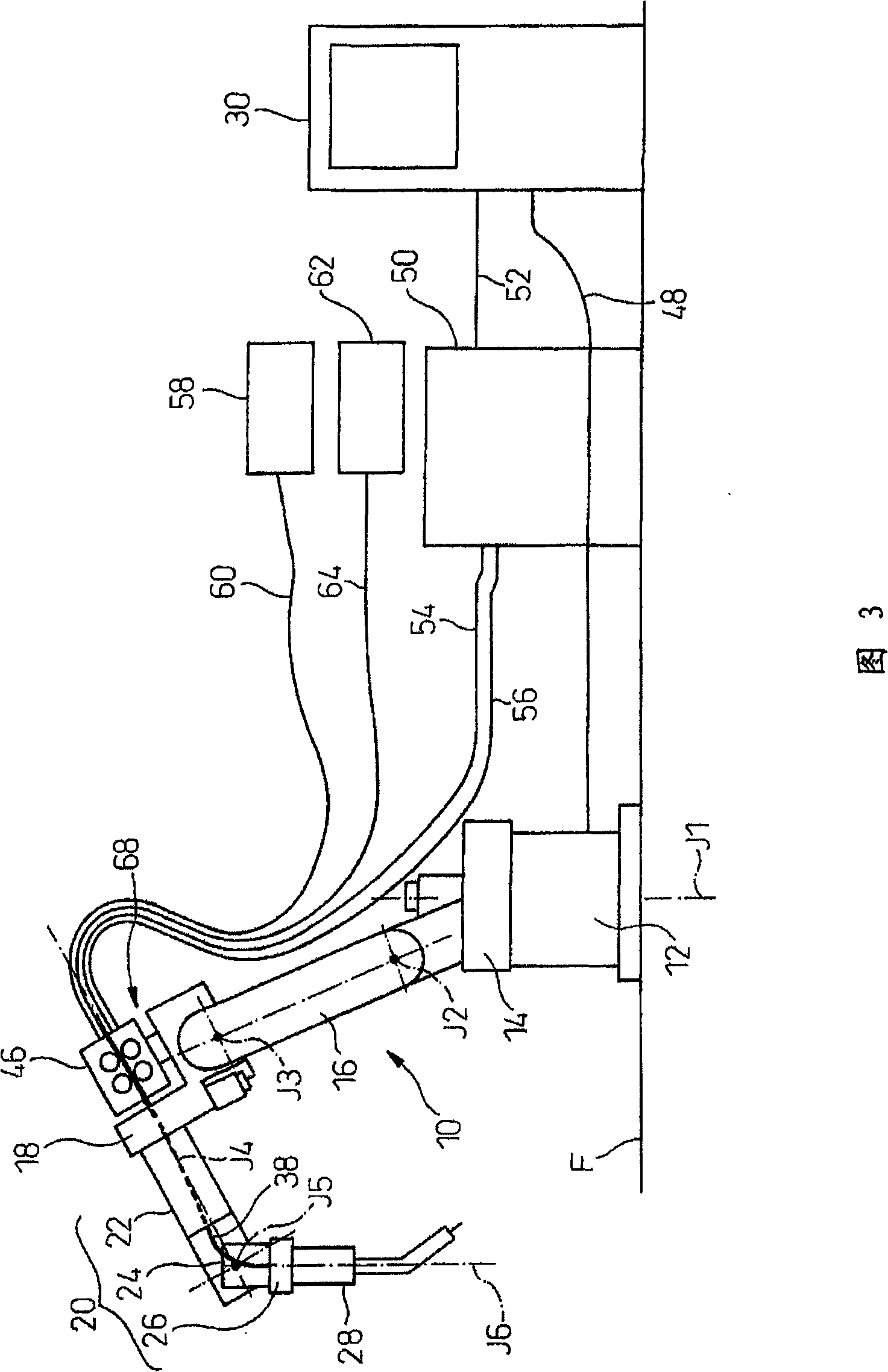
[0030] Referring to the drawings, FIGS. 1 to 2B show main parts of a robot 10 according to an embodiment of the present invention. Moreover, FIG. 3 schematically shows an example of the overall configuration of the robot system including the robot 10. The illustrated robot 10 has a 6-axis vertical multi-joint type mechanical structure, but the mechanical structure of the robot of the present invention is not limited to this. In addition, the term "robot" in the present application means a mechanism unit other than a control device.
[0031] The robot 10 has a six-degree-of-freedom arm structure (that is, a manipulator) supported on a stationary base 12 fixedly installed on the floor F (FIG. 3 ). This arm structure includes: a rotating table 14 rotatably connected to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More