

Myoelectric control ability detecting and training method for hand-prosthesis with multiple fingers and multiple degrees of freedom
A technology of myoelectric control and training method, which is applied in prosthesis, medical science, artificial arm, etc., and can solve the problems of no myoelectric control ability detection training method and device, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
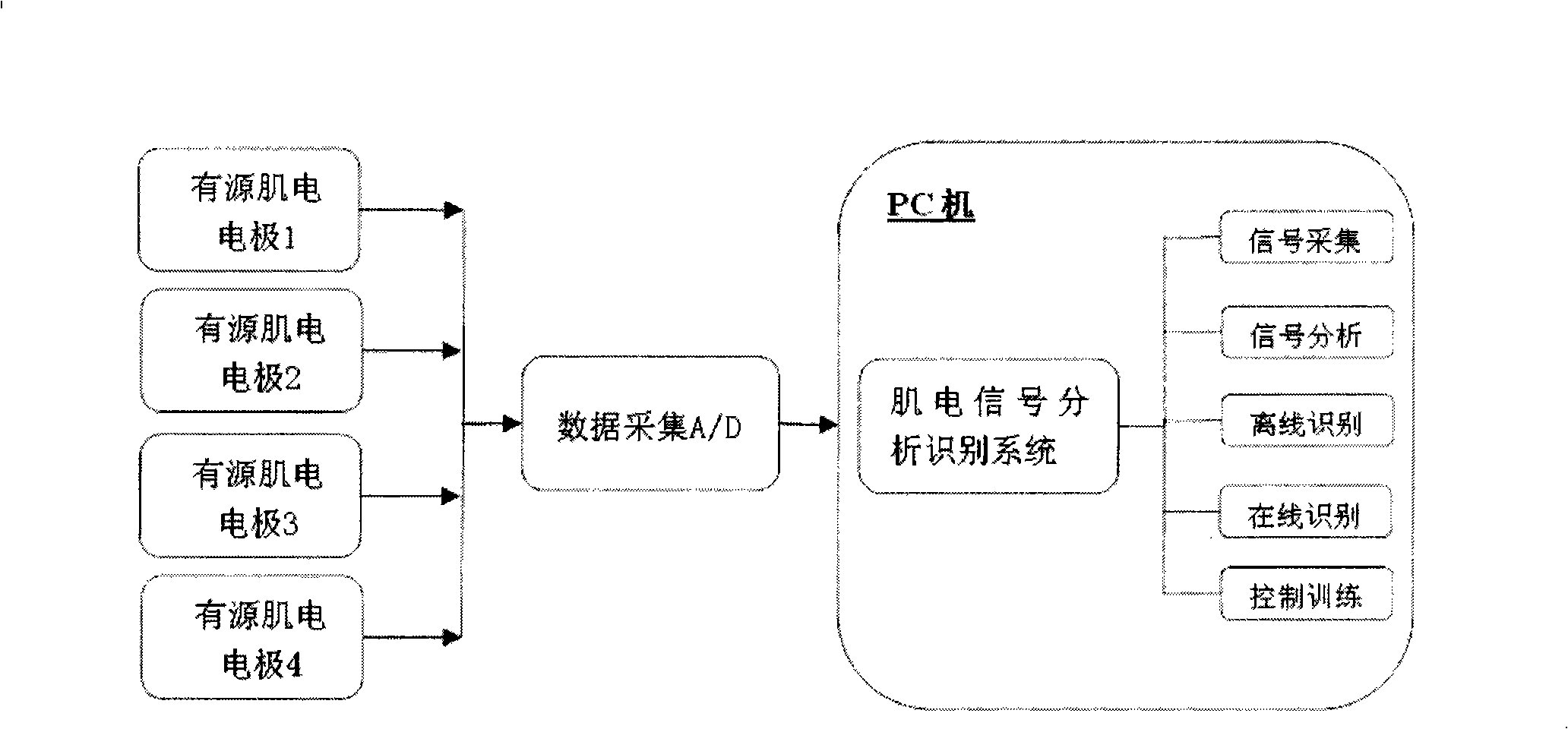
[0034] The method and device for detecting and training the ability of myoelectric control of the multi-finger multi-free artificial hand based on the pattern recognition myoelectric control include hardware and software.
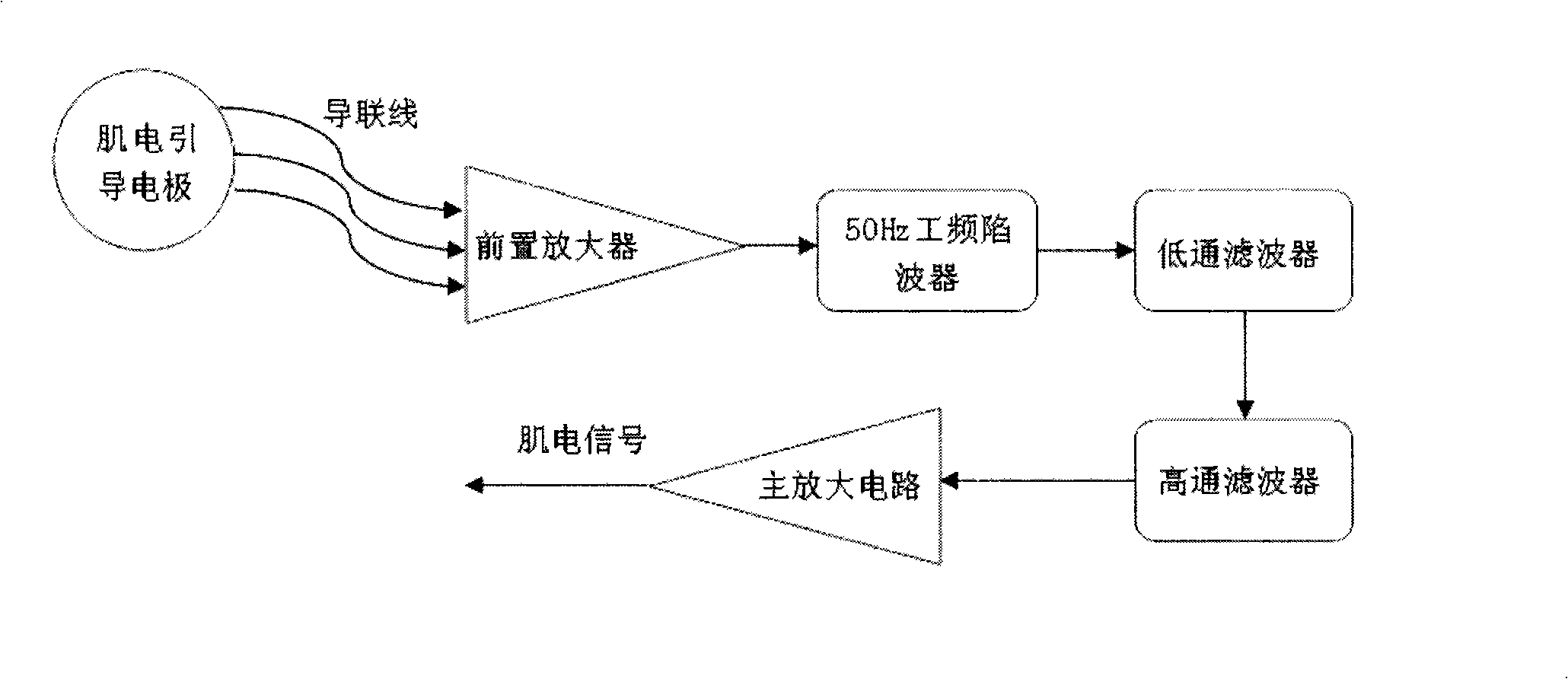
[0035] figure 1 Among them, the hardware mainly consists of four source myoelectric electrodes, an A / D data acquisition card and a PC. The function of the active myoelectric electrode is to extract the EMG transmitted from the muscle contraction to the skin surface, amplify and filter it, and then convert it into a digital signal through the A / D data acquisition card and transmit it to the PC. The 4 active myoelectric electrodes were respectively fixed above the muscle bellies of extensor pollicis brevis, extensor digitorum, flexor digitorum superficiale and flexor carpi ulnaris with wrist guards. It should be noted that for amputees with short stumps, depending on the condition of the residual muscles, only 2 or 3 surface electrodes can be selected to be ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More