

Man machine exoskeleton system and force control device thereof
An exoskeleton and human-machine technology, applied in medical science, prosthesis, etc., can solve problems such as inconvenient use and limited movement modes, and achieve the effect of simple and convenient control and small human-machine force
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The human-machine exoskeleton system and its force control method provided by the present invention will be described in detail below with reference to the accompanying drawings and specific embodiments.
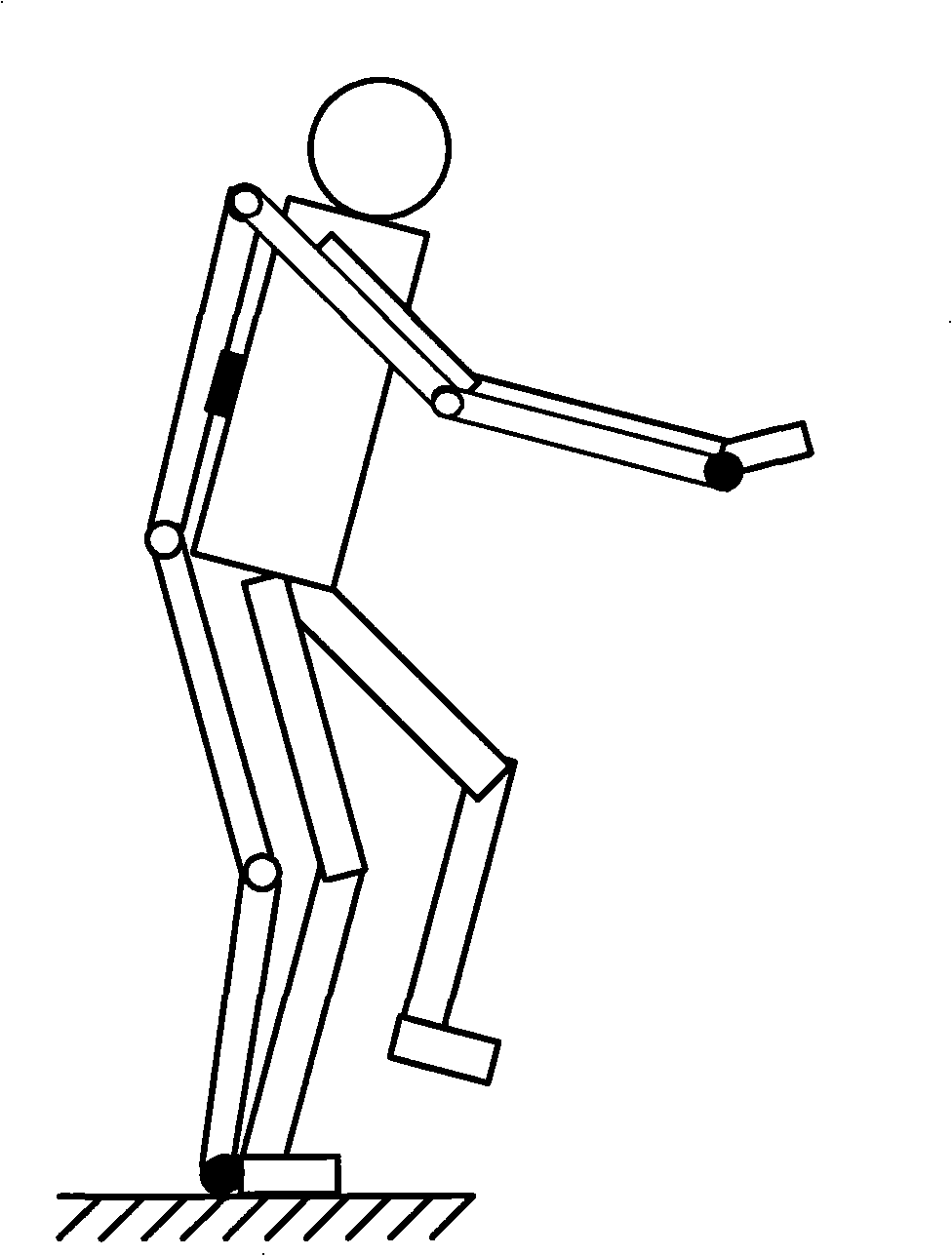
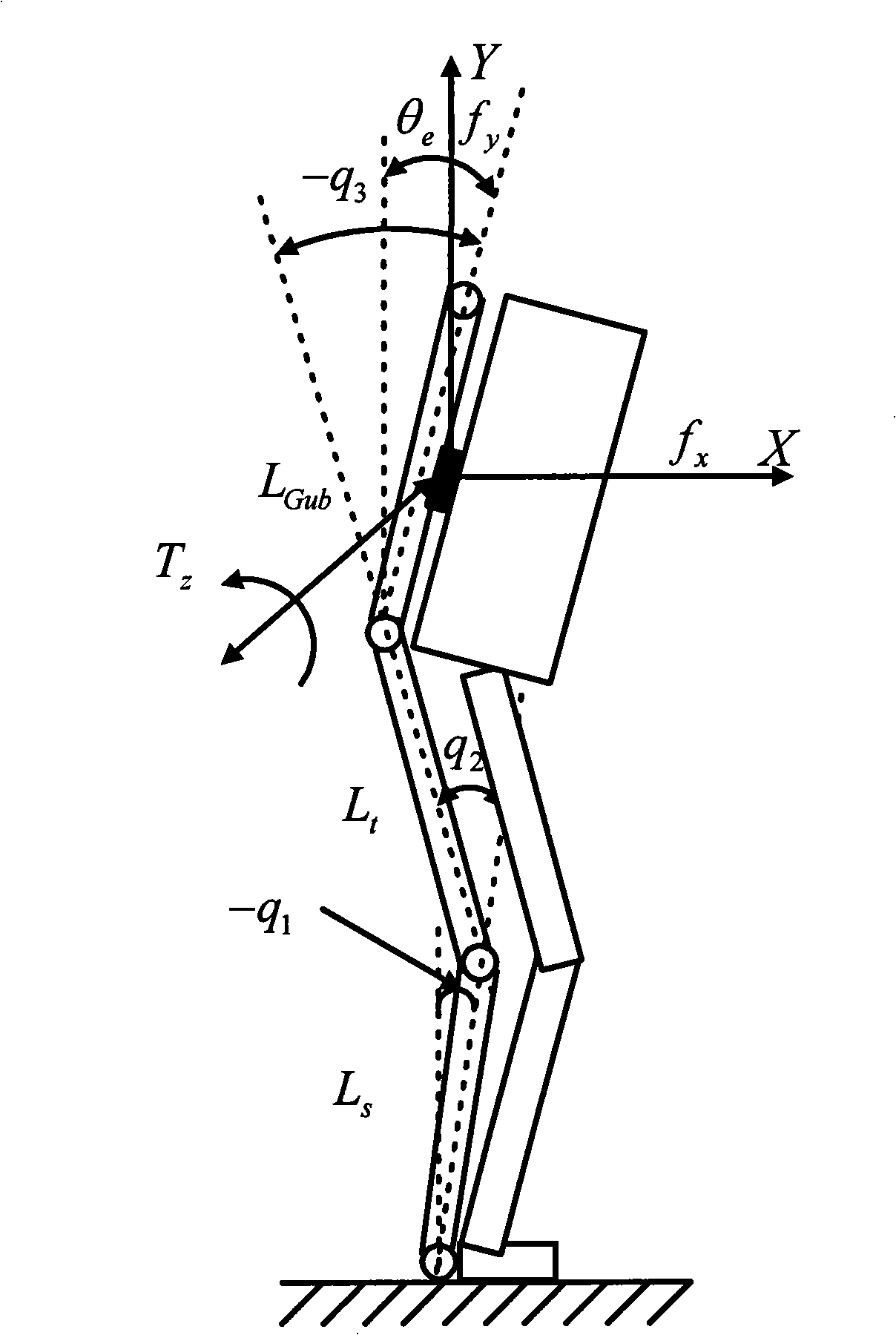
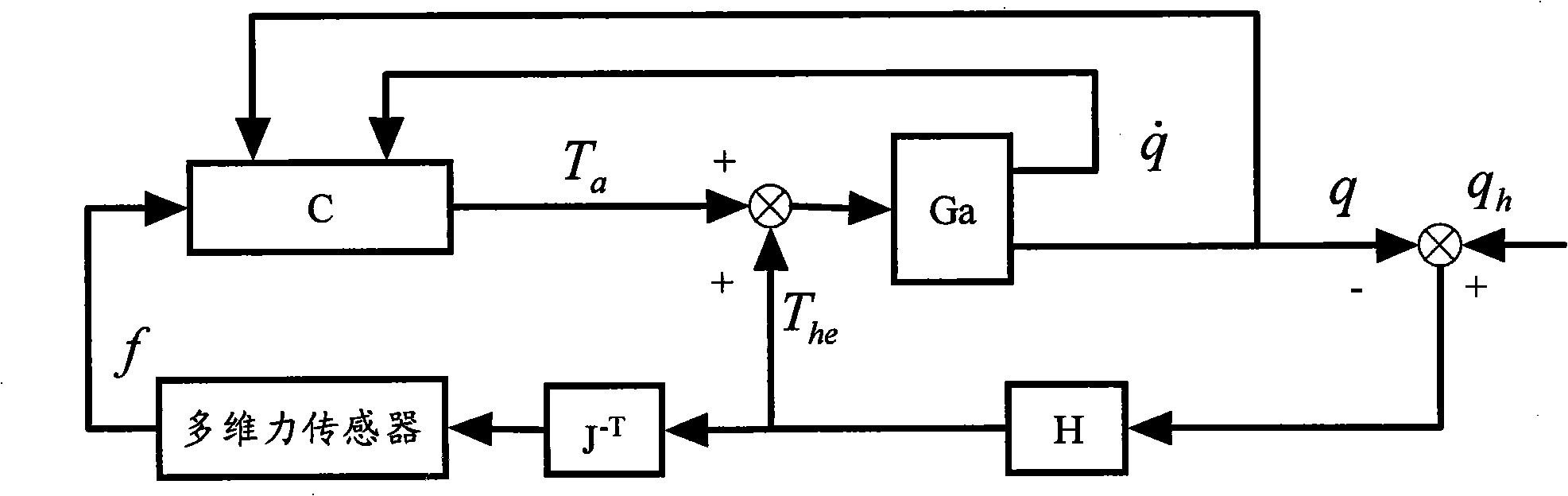
[0032] The man-machine exoskeleton system and its force control method proposed by the present invention are used to control the movement of the exoskeleton following the human body and keep the man-machine force small. The force mentioned here is a generalized force, including force and moment, and force refers to the force between man and machine. The system includes sensors, controllers and drivers. The controller generates the control signal of the driver in real time according to the information measured by the sensor, controls the driver to output the control torque, realizes the tracking of the human-machine movement by the exoskeleton, and keeps the human-machine force small.
[0033] Partition Control Module
[0034] Divide the upper limbs, lower limbs, and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More