

Multimode bionic amphibious robot
A robot and multi-modal technology, applied in the field of robots, can solve problems such as inability to be guaranteed at the same time, limited amphibious activity capability, and low degree of intelligence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
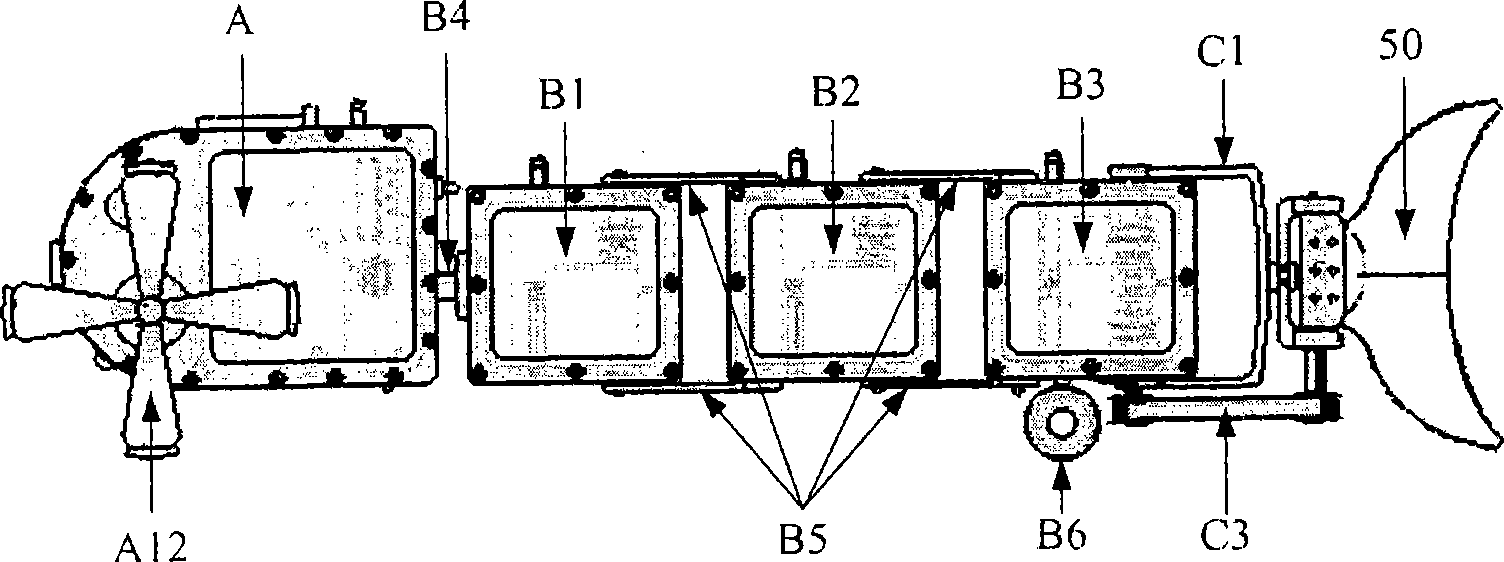
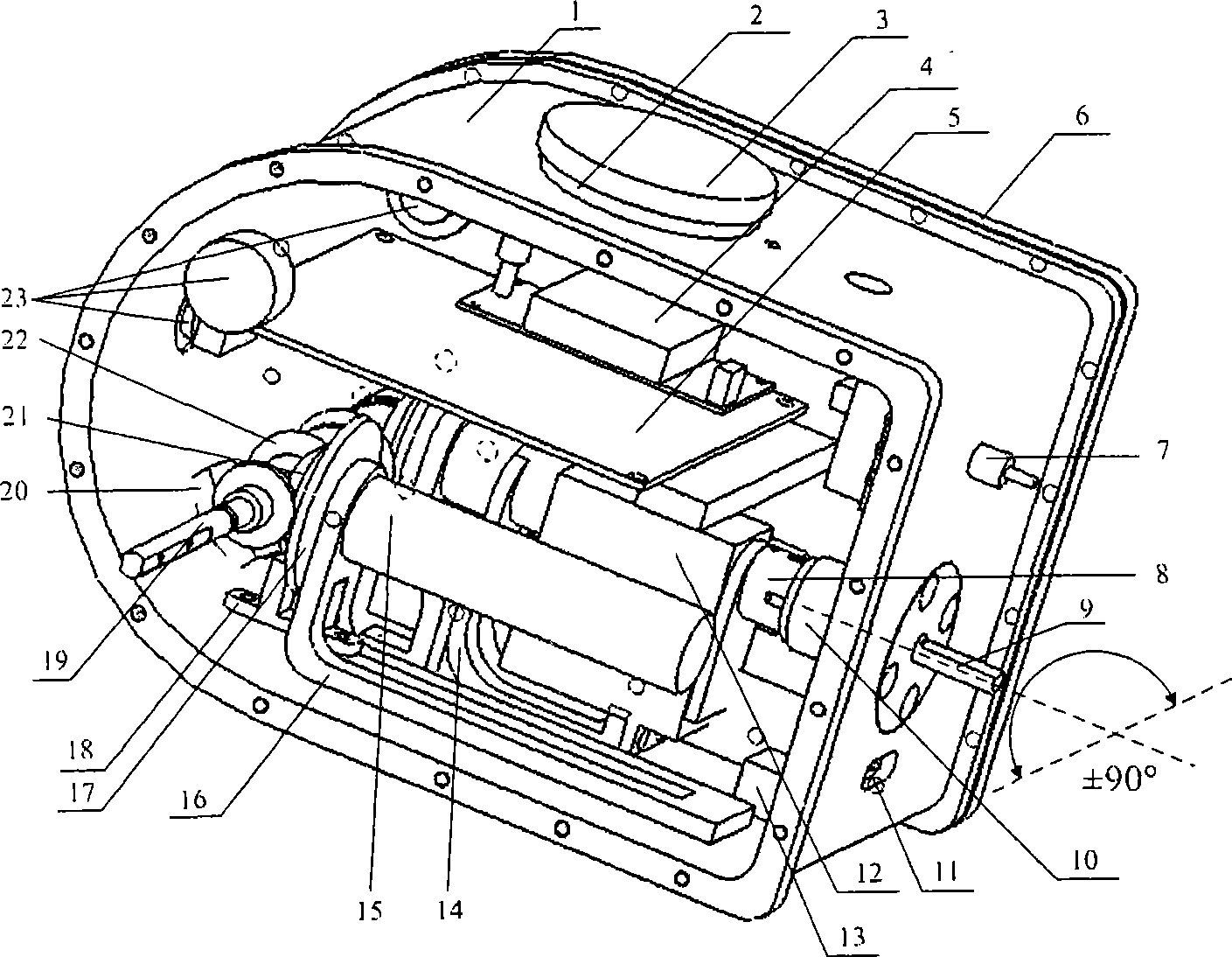
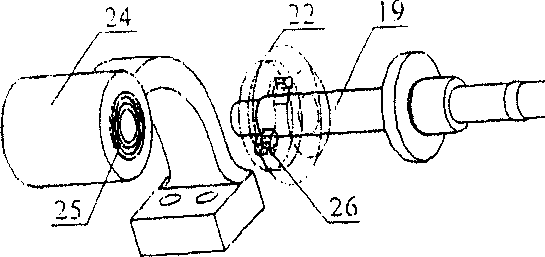
[0056] The specific features of the multimodal bionic amphibious robot of the present invention are as follows:
[0057] Head structure: In order to achieve drag reduction in water and accommodate many mechanical and electrical components, the front part adopts an arc-shaped design, and the rear adopts a regular planar shape. The main driving components of the head are DC motor and swivel steering gear. Two DC motors are respectively installed on the fixed frame along the longitudinal direction of the robot body. After the output of the motor is changed by 90° through the bevel gear, it drives the motor shaft of the head to rotate. When the flipper mechanism is installed on the motor shaft, it rotates continuously for a full circle. It can drive the robot to crawl on the ground, and its reciprocating swing around a certain center can realize the forward, backward, turning and pitching of the robot in the water; the wheel and paddle mechanism adopts a wheel-like four-spoke desi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More