

Single motor driven two-freedom degree joint structure
A technology of single-motor drive and joint structure, which is applied in the field of bionic robots, can solve problems such as troublesome motor layout, and achieve the effect of improving drive efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in further detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
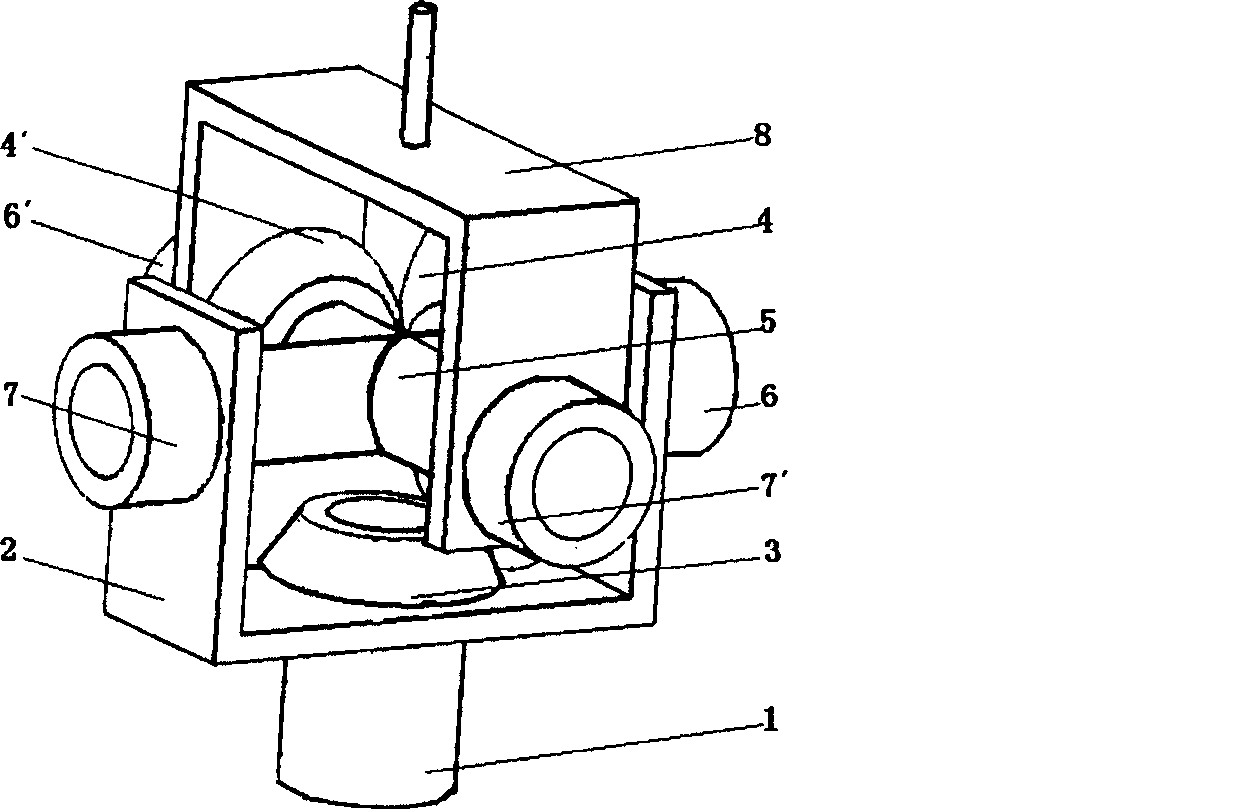
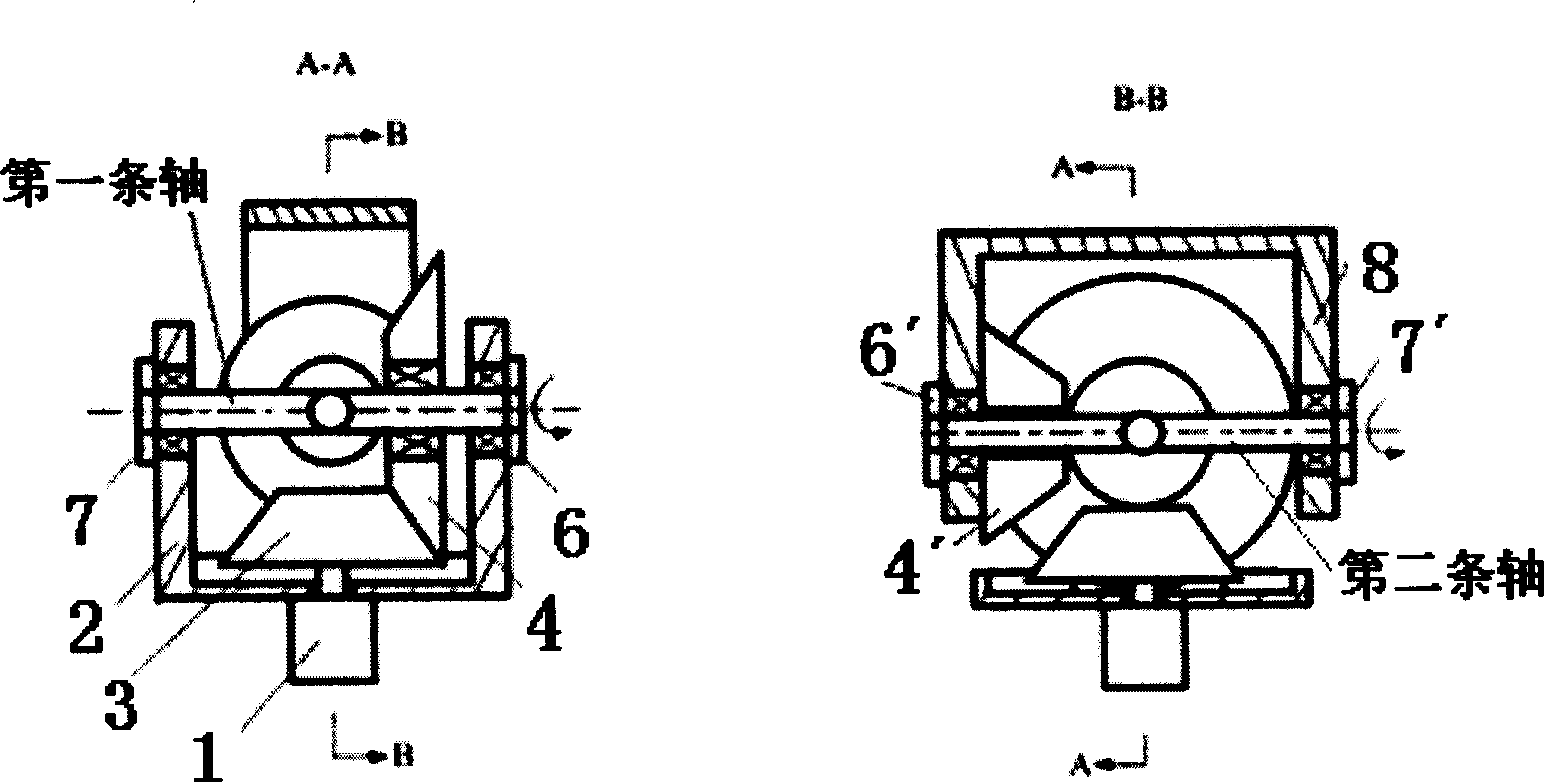
[0027] like figure 1 as shown, figure 1 A schematic diagram of the structure of a two-degree-of-freedom joint driven by a single motor provided by the present invention, the structure consists of a motor 1, a frame 2, a motor gear 3, a first gear 4, a second gear 4', a cross shaft 5, a first An angular displacement sensor 6 , a second angular displacement sensor 6 ′, a first magneto-rheological damper 7 , a second magnetorheological damper 7 ′ and an actuator 8 are formed.
[0028] Wherein, the frame 2 is connected with the execution part 8 through the cross shaft 5, the frame 2 is connected with the first shaft of the cross shaft 5 through a bearing, and the execution part 8 is connected with the first shaft of the cros...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More