

Passive driving type two-freedom degree artificial finger for disabled person
A technology for passive driving and disabled persons, applied in the direction of artificial arms, etc., to achieve the effect of simple and fast installation, simple and fast connection, and anthropomorphic movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach 1
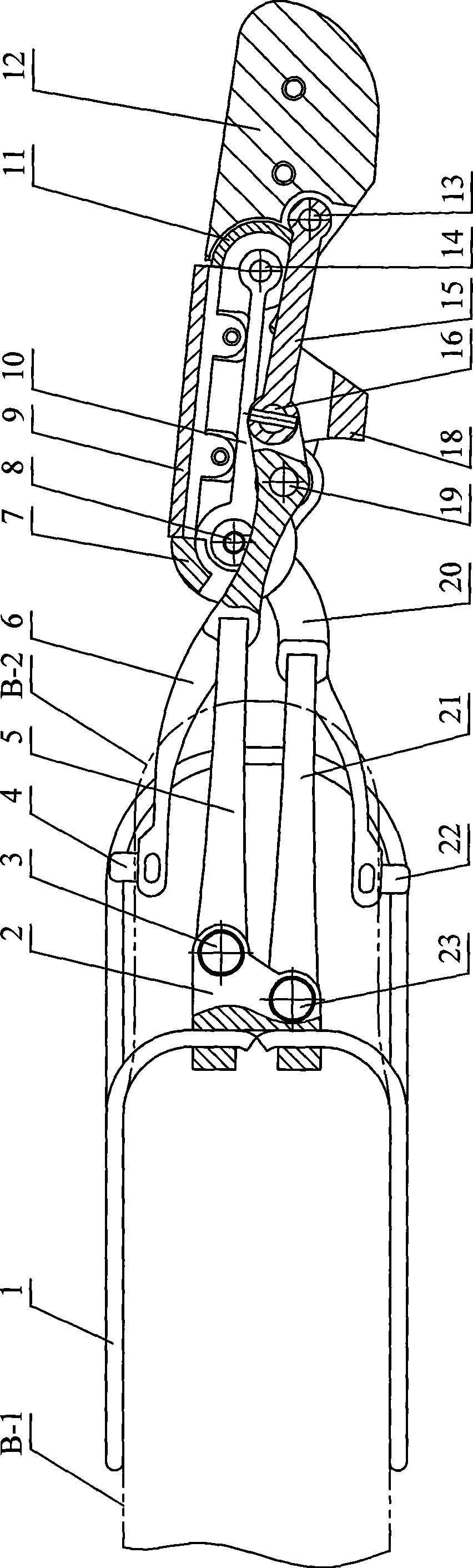
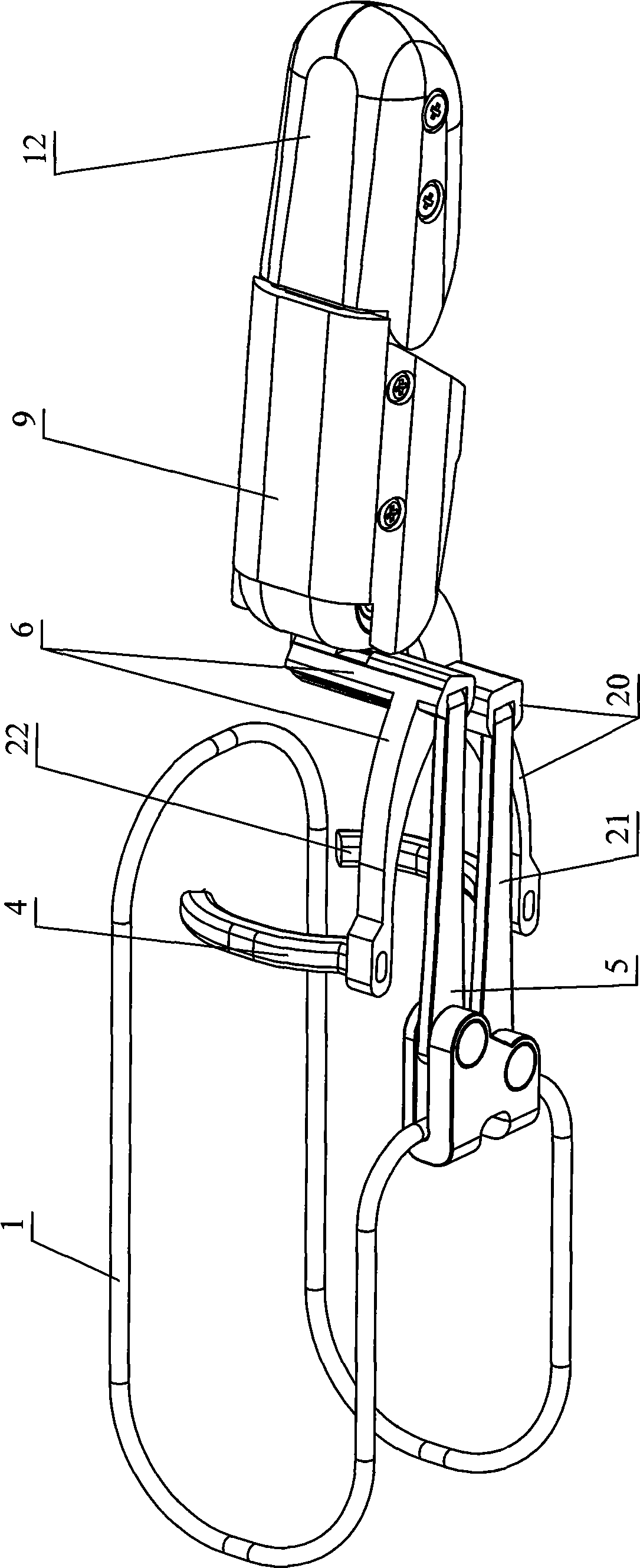
[0007] Specific implementation manner one: such as Figure 1~2 As shown, the passively driven two-degree-of-freedom artificial finger for the handicapped in this embodiment includes a connecting spring frame 1, a base 2, an upper wire 4, a base knuckle upper link 5, and a base knuckle upper stop rod 6. , Lower stop wire 22, base knuckle lower connecting rod 21, base knuckle lower stop rod 20, middle knuckle skeleton 10, middle knuckle connecting rod 15, fingertip 12 and several shafts; connecting the front end of spring frame 1 and base 2 Rotating connection, the upper base phalanx link 5 is arranged above the lower base phalanx link 21, one end of the upper base phalanx link 5 is connected to the base 2 through the first shaft 3, and the lower link 21 of the base phalanx One end is connected to the base 2 through the second shaft 23, the other end of the upper base knuckle link 5 is fixedly connected to the middle of the upper base knuckle stop rod 6, and the other end of the lowe...
specific Embodiment approach 2
[0011] Specific implementation manner two: such as Figure 1~2 As shown, the artificial finger for the disabled in this embodiment also includes a middle knuckle joint cover 7 and a fingertip joint cover 11. The middle knuckle joint cover 7 is arranged on one end of the middle knuckle skeleton 10, and the fingertip joint cover 11 It is set on the other end of the middle phalanx skeleton 10. The middle knuckle joint cover plate 7 and the fingertip joint cover plate 11 maintain the shape of the finger joints during movement. Make the appearance of fake fingers more vivid. Other components and connection relationships are the same as in the first embodiment.
specific Embodiment approach 3
[0012] Specific implementation manner three: such as Figure 1~2 As shown, the artificial finger for the disabled in this embodiment also includes a middle finger upper cover 9 and a middle finger pad 18. The middle finger upper cover 9 is arranged on the upper part of the middle finger skeleton 10, and the middle finger pad 18 is arranged on The lower part of the middle knuckle skeleton 10. The upper cover plate 9 of the middle finger and the pad of the middle finger 18 constitute the shape of the middle finger, which makes the appearance of the fake finger more vivid. Other components and connection relationships are the same as those in the first or second embodiment.
[0013] working principle:
[0014] The fitting shape of the connecting spring frame 1 of the present invention is similar to the shape of the palm, and the artificial finger (the present invention) is connected to the palm (such as figure 1 As shown, B-1 is the palm part, B-2 is the remaining base phalanx), the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More