

Active mode human leg prosthetic limb
An active, prosthetic technology, used in artificial legs, prostheses, medical science, etc., can solve the problems of inability to guarantee standing stability, no power to walk, inconvenient walking, etc., to facilitate long-term walking and ensure stability. , The effect of simplifying the prosthetic mechanism
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0012] Further describe the present invention below in conjunction with embodiment and accompanying drawing thereof. The embodiments and accompanying drawings are only used to describe the present invention in detail, and do not constitute a limitation to the claims of the present invention.
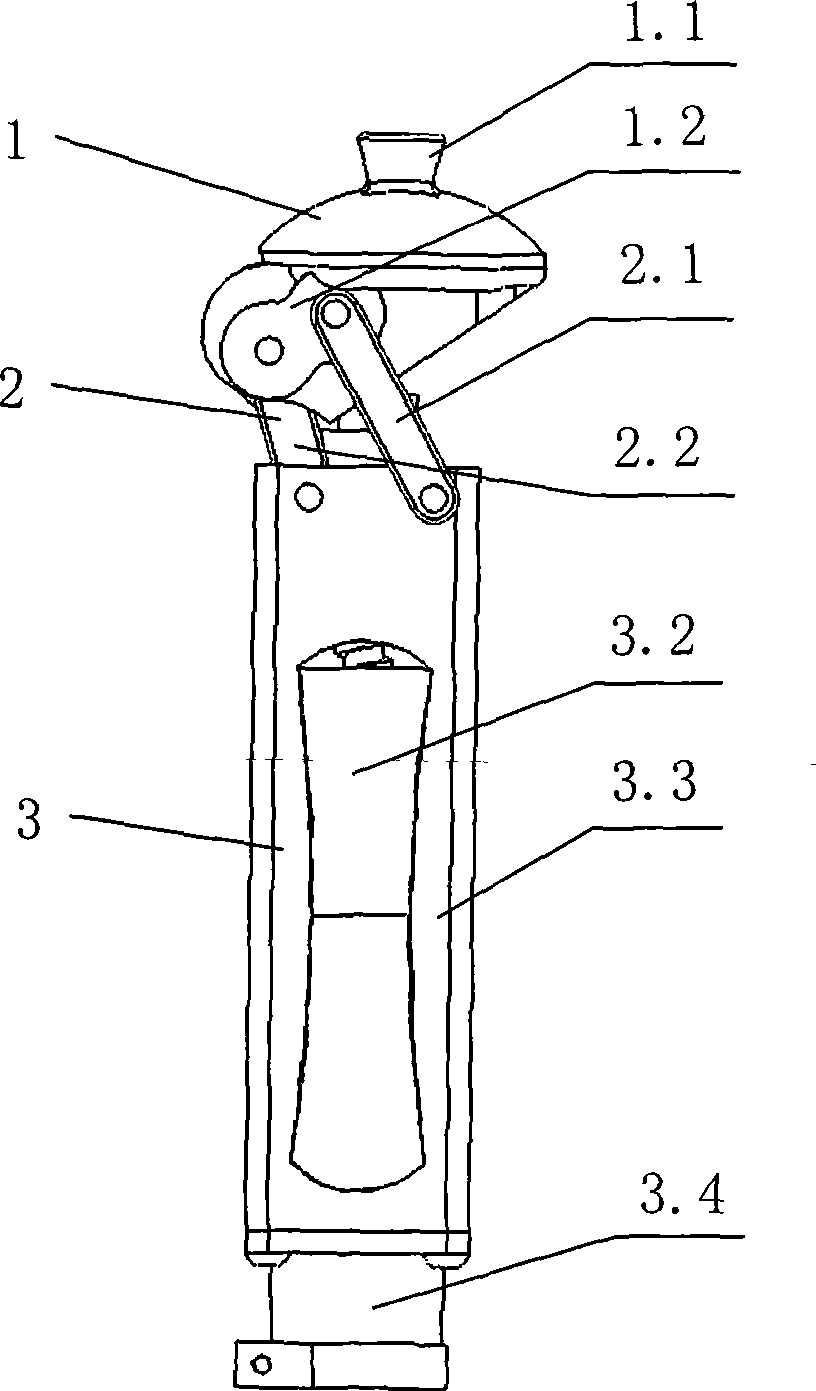
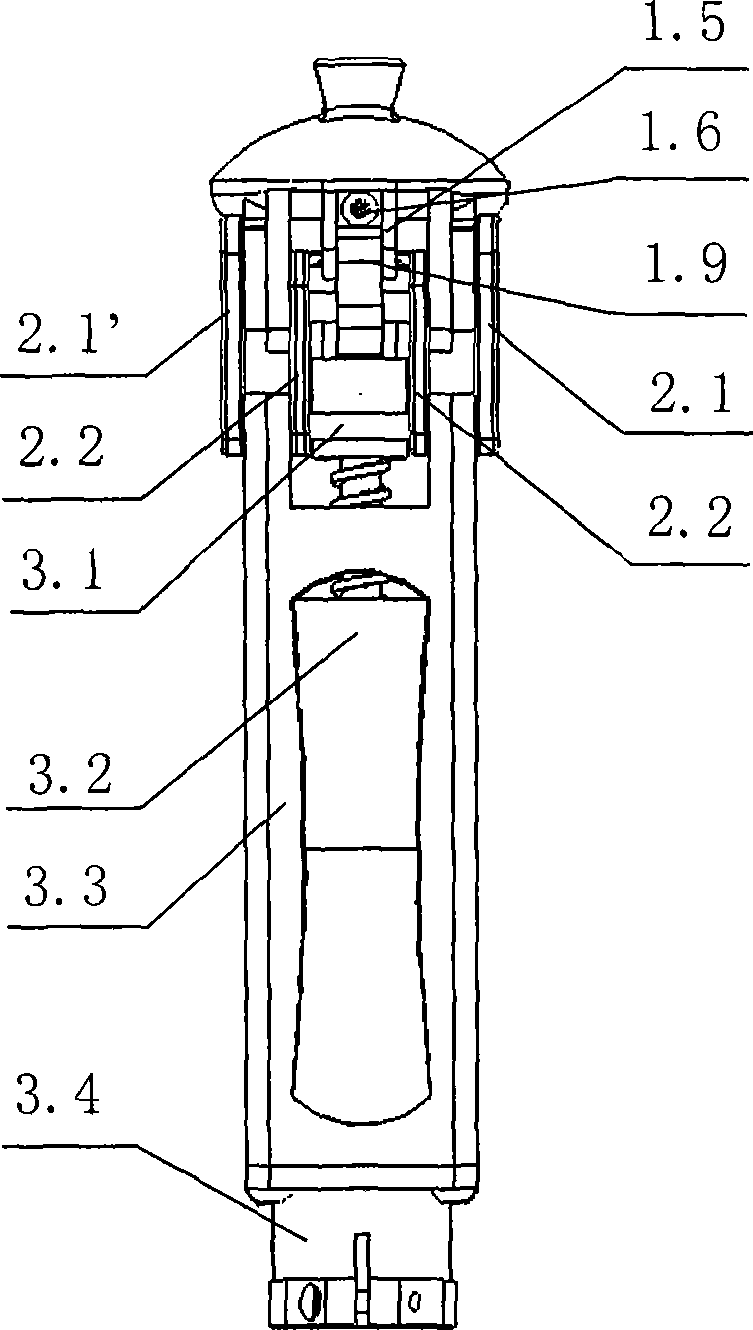
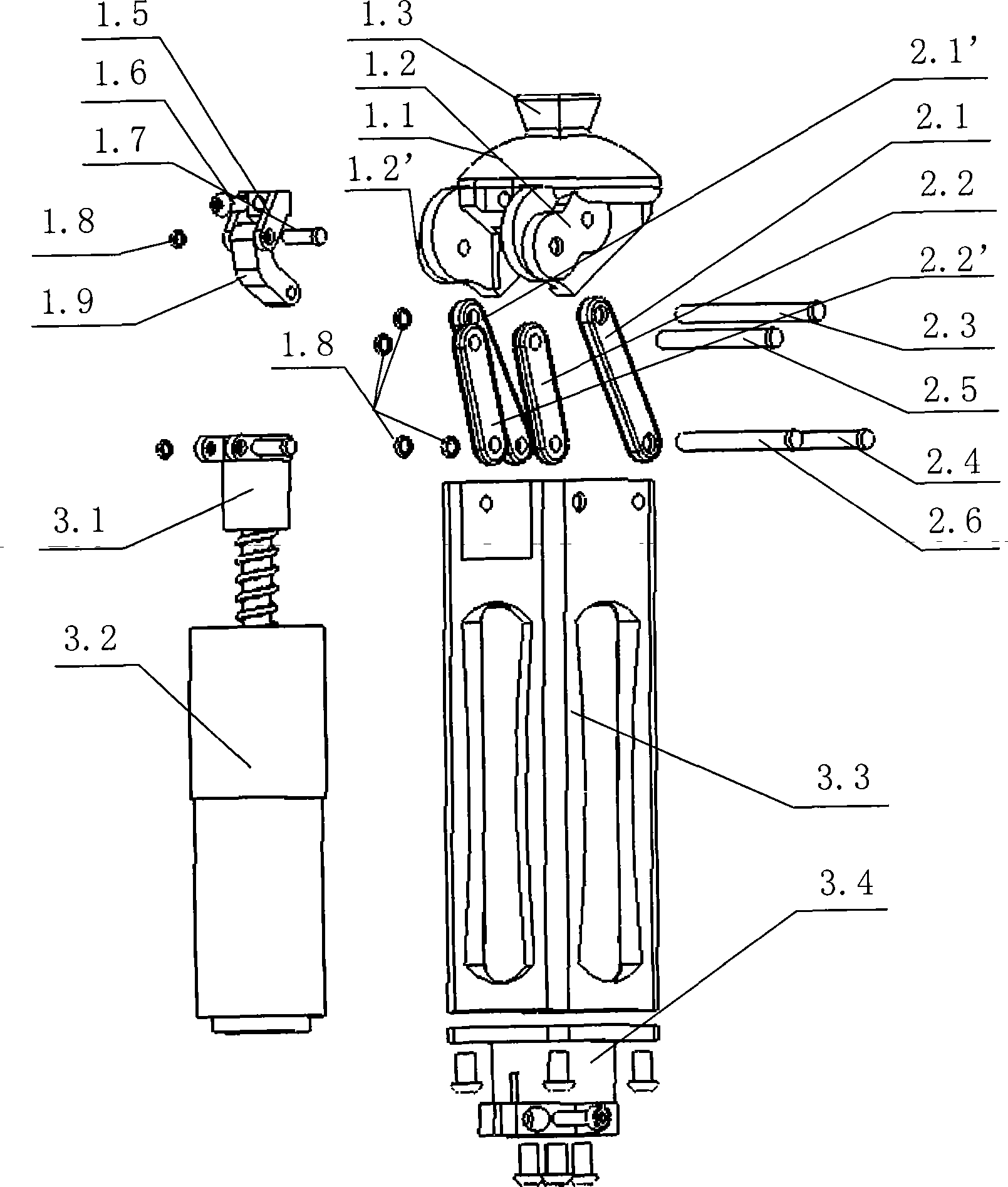
[0013] The active human leg prosthesis (abbreviation prosthesis of the present invention, see figure 1 -6), it is characterized in that it comprises knee joint part 1, connecting part 2 and tibial part 3 and constitutes four-bar linkage mechanism; Described connecting part 2 comprises left and right symmetrical front connecting rod 2.1, 2.1 ' and left and right symmetrical The rear connecting rods 2.2, 2.2 ', the upper ends of the left and right front connecting rods 2.1, 2.1 ' and the left and right rear connecting rods 2.2, 2.2' are connected with the knee joint part 1 as a bar of the four-bar linkage mechanism, and the left and right The lower end of the right front connecting rod 2....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More