

Space mapping method of assisted surgery for robots
A robot-assisted, surgical technology, applied in surgical robots, operations, sensors, etc., can solve the problems of cumbersome positioning methods, affecting positioning accuracy, and time-consuming
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
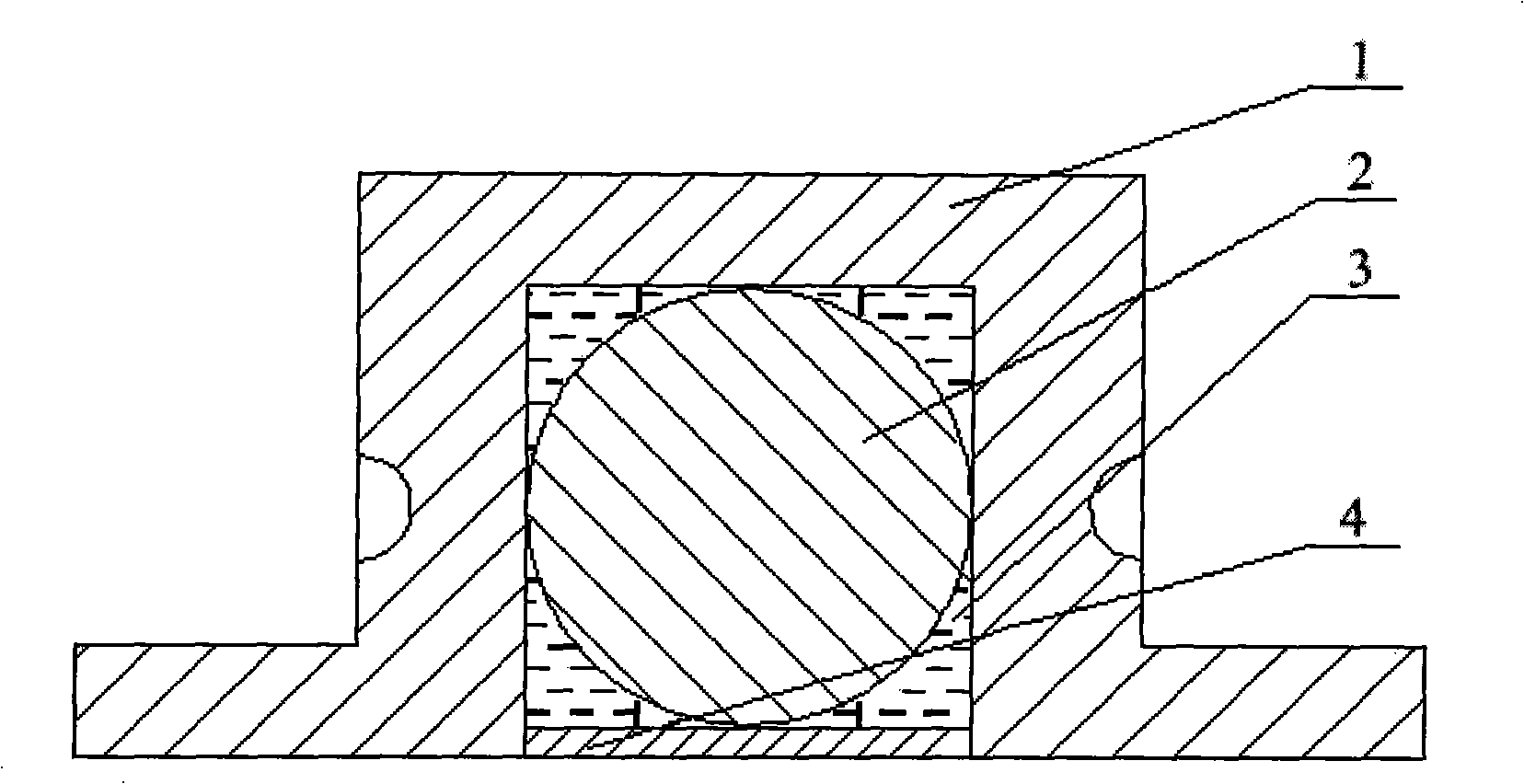
[0055] The invention adopts a binocular vision camera and does not rely on any other equipment (probe or robotic arm). The camera directly recognizes the specific mark and matches the mark in the image coordinate system. Robotic surgery is to map the coordinates of the robot to the image space. The robot-assisted surgery space includes the following spaces: medical image (CT\MRI, etc.) space, robot space, and patient space during surgery to achieve the mapping between these different spaces Need to have specific markers (Marker), these markers can be identified in each space, so as to establish the connection between each space; these connections through 3 or more markers in different spaces to establish the same coordinates System realization; 3 marking points to establish a rectangular coordinate system, 4 or more marking points to establish an affine coordinate system; to achieve rapid and accurate positioning, rapid and accurate establishment of coordinate systems in different...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More