Exoskeleton manipulator and use method
A manipulator and exoskeleton technology, used in passive exercise equipment, physiotherapy, artificial arms, etc., can solve the problems of complex design and manufacturing precision and process, incapable of large-scale promotion and application, and uneconomical use by the general public. Simple structure, preventing finger muscle atrophy, and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
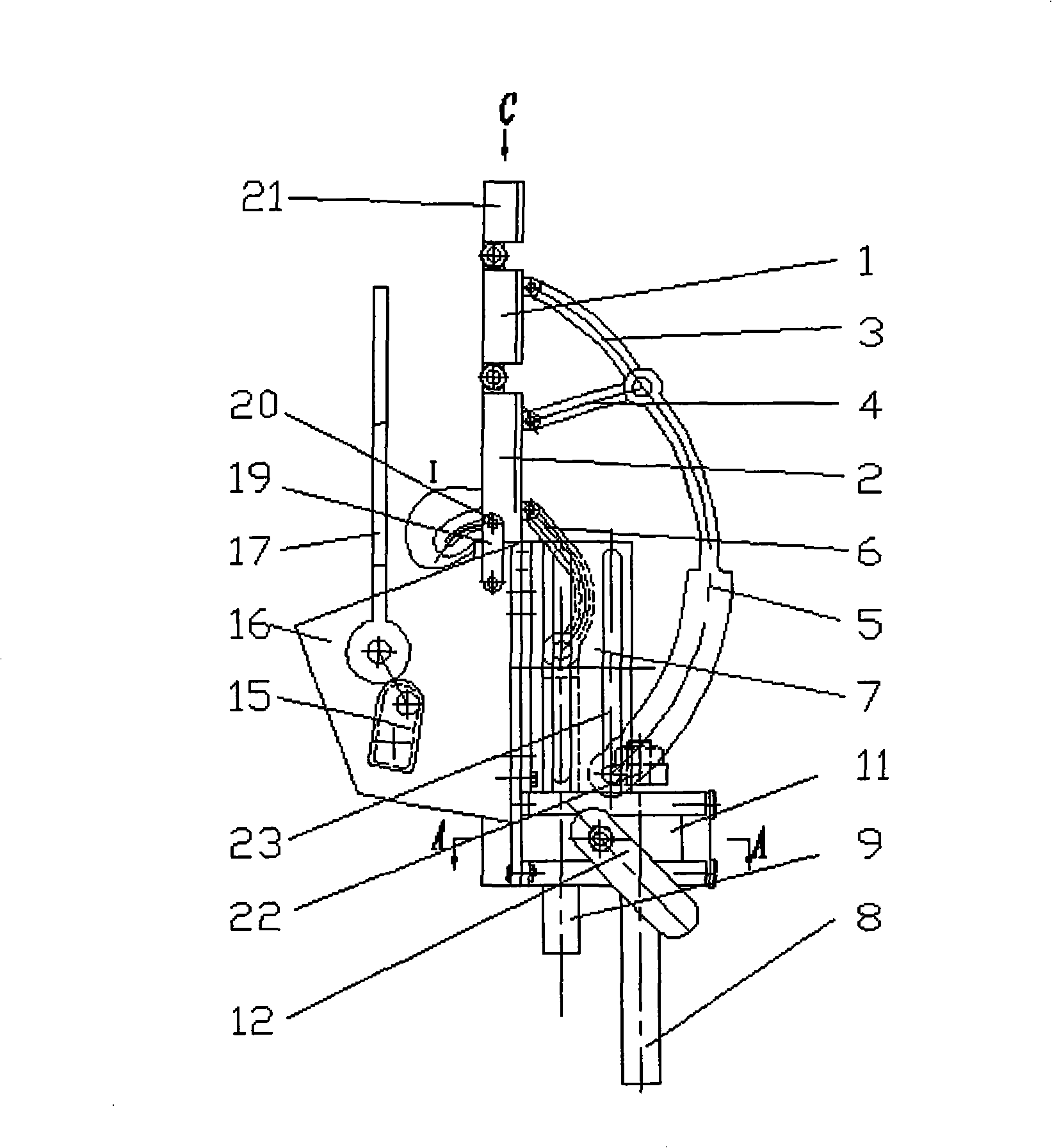
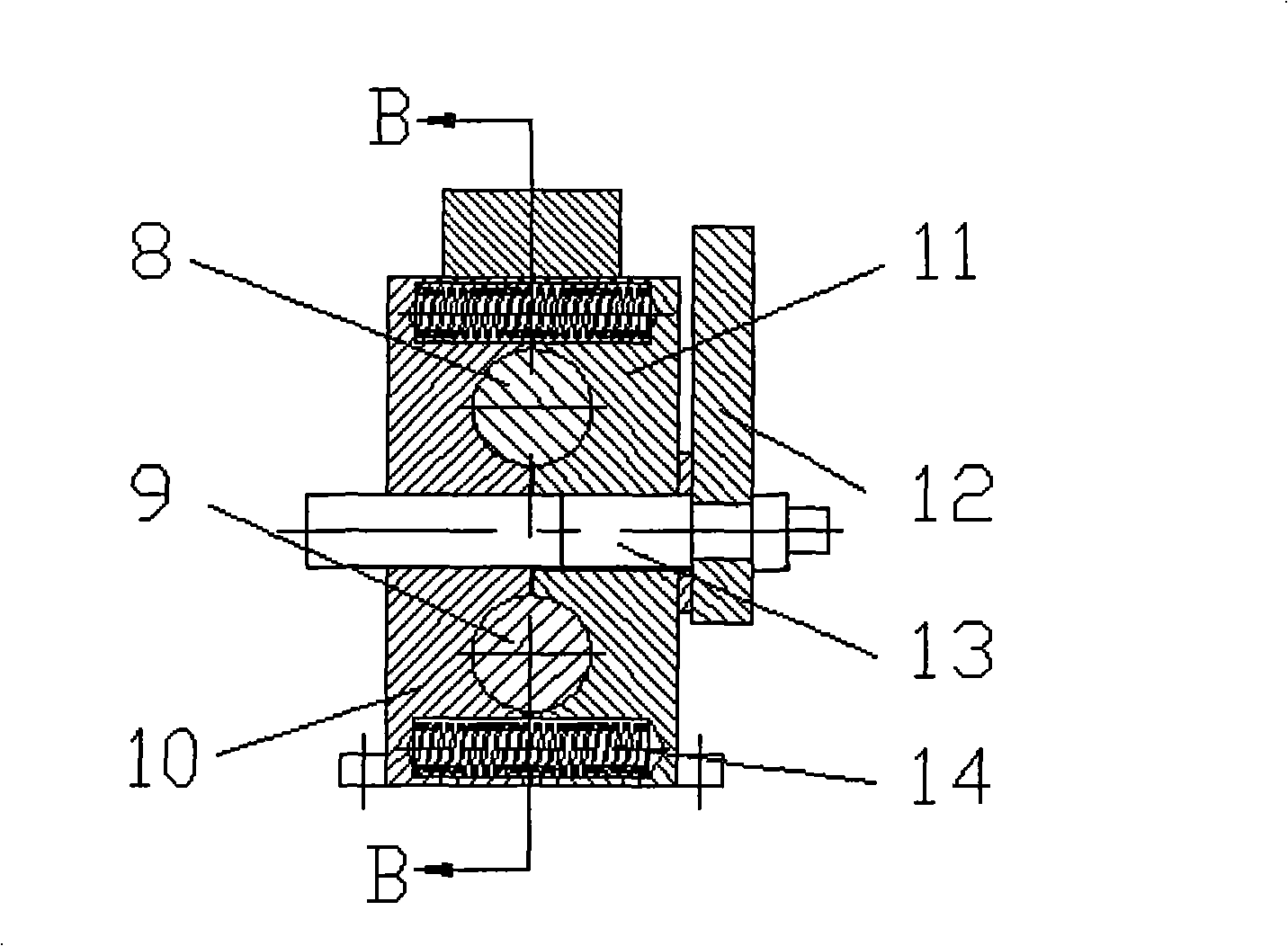
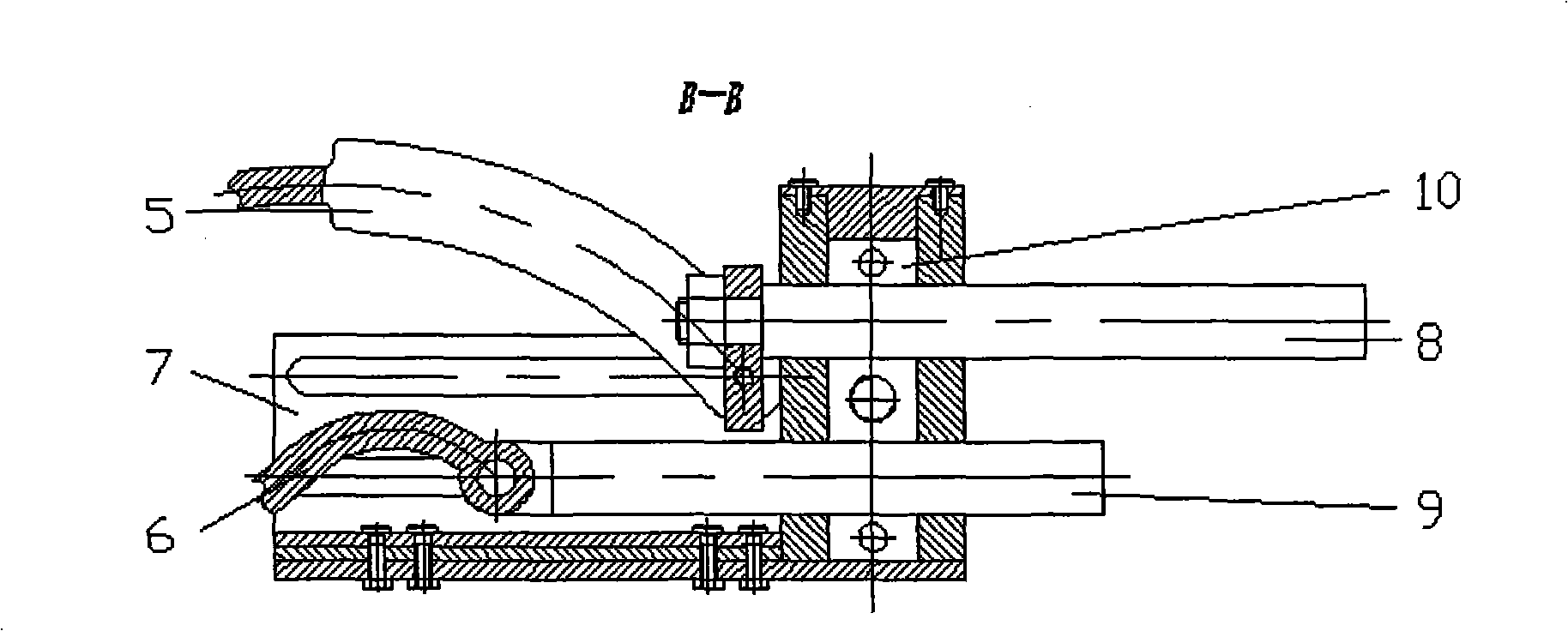
[0031] see Figure 1-5, an exoskeleton manipulator, which includes a non-thumb transmission mechanism and a thumb transmission mechanism, the non-thumb transmission mechanism includes a middle knuckle 1, the upper end of the middle knuckle is hinged with a distal knuckle 21, and the lower end is hinged with a proximal Knuckle 2, the back of the middle phalanx is hinged with a middle link 3, the back of the proximal phalanx is hinged with a proximal link 4 and a proximal bend 6, and the middle link and the proximal link pass through the middle The end curved rod 5 is connected with the upper round rod 8, the near-end curved rod is connected with the lower round rod 9, and the upper round rod and the lower round rod are provided with a first pin 22, which can slide in the chute 23 of the curved rod guide rail 7 , the upper round bar and the lower round bar are provided with a locking mechanism outside, and the locking mechanism includes a right locking part 10 and a left locking...
Embodiment 2
[0035] The difference between this embodiment and Embodiment 1 is: change the upper and lower round rods 8, 9 into the piston rods of a certain hydraulic cylinder, and control the movement of the piston rods through the regulating valve, so as to realize the slow bending and straightening of the fingers This can be used as a medical aid for finger rehabilitation to prevent finger muscle atrophy.
Embodiment 3
[0037] The difference between this embodiment and Embodiment 1 is: the upper and lower round rods 8, 9 are changed into transmission screw rods, and the motor is used to drive the nut to realize the expansion and contraction of the fingers, which can provide more power for the hands, which can be used as a The hand reinforcement device works in harsh and demanding environments, helping people to exert their limits and to lift and hold objects that require more strength than the human hand itself.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com