

Method for multi-camera automated high-precision calibration
A multi-camera and calibration method technology, applied in the calibration field, can solve the problems of slow calibration time, and achieve the effect of improving speed and ensuring robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
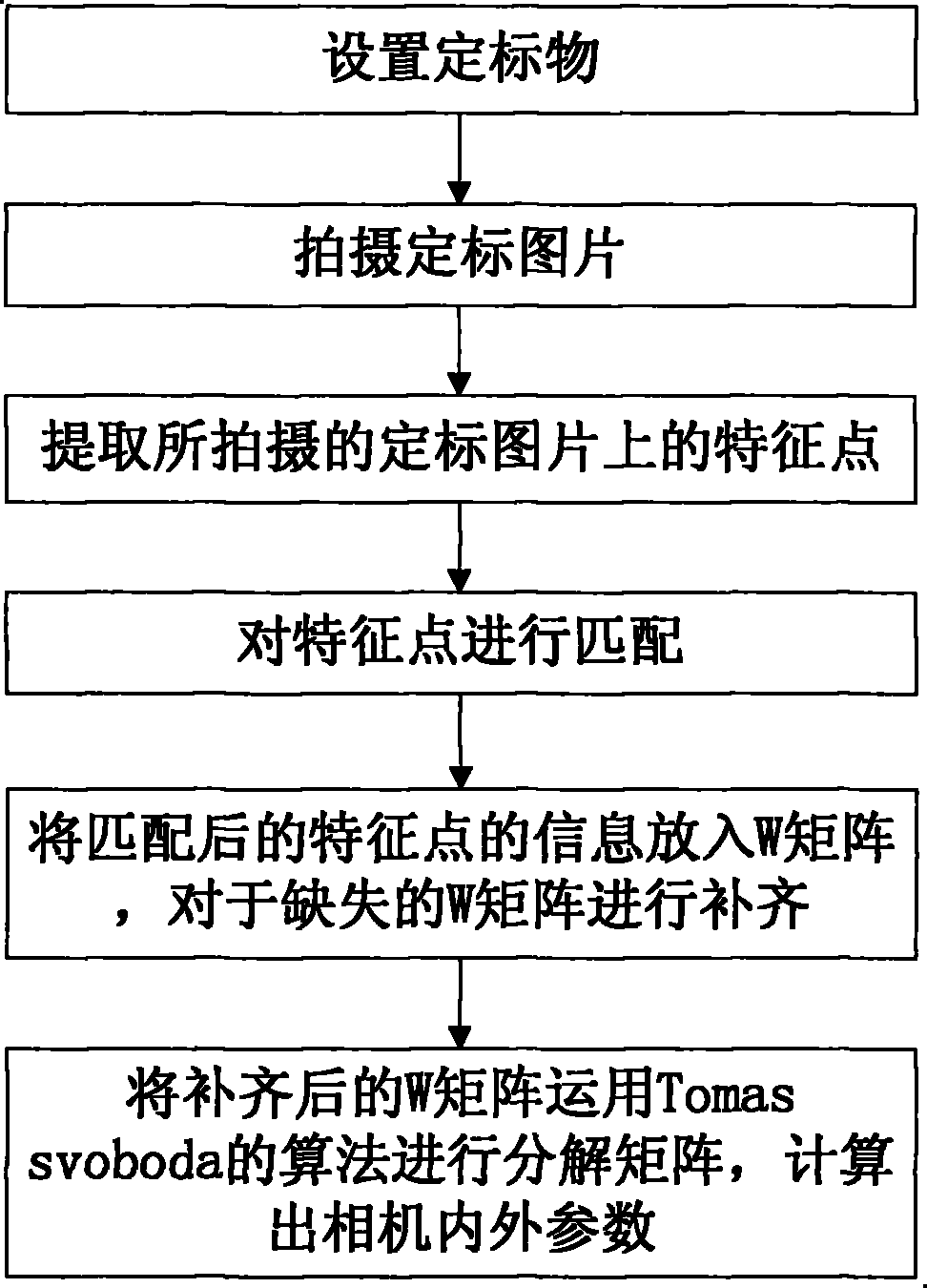
[0054] A kind of multi-camera automatic high-precision calibration method of the present invention, such as figure 2 As shown, the following steps are included: 1. Setting the calibration object; 2. Taking the calibration picture; 3. Extracting the feature points on the taken calibration picture; 4. Matching the feature points; The point information is put into the W matrix, and the missing W matrix is filled; 6. The filled W matrix is decomposed by the algorithm of Tomas svoboda, and the internal and external parameters of the camera are calculated.
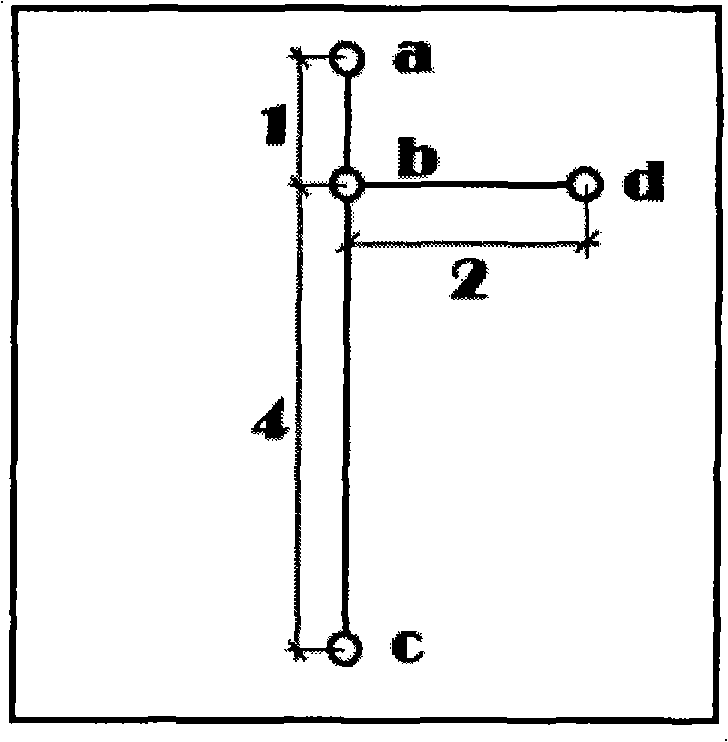
[0055] (1) Set the calibration object;
[0056] Such as image 3 As shown, the calibration object consists of four proportional LED light sources a, b, c, and d fixed on a wooden board, where the three LED light sources a, b, and c are collinear, and the three LED light sources a, b, and c The straight line where the light source is located is perpendicular to the straight line where the two LED light sources are located,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More