

Nonlinear compensating method for pseudo satellite and inertial integrated navigation system
A nonlinear compensation and navigation system technology, applied in radio wave measurement system, navigation through speed/acceleration measurement, measurement device, etc., can solve problems such as divergence, poor filtering performance, and large linear error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
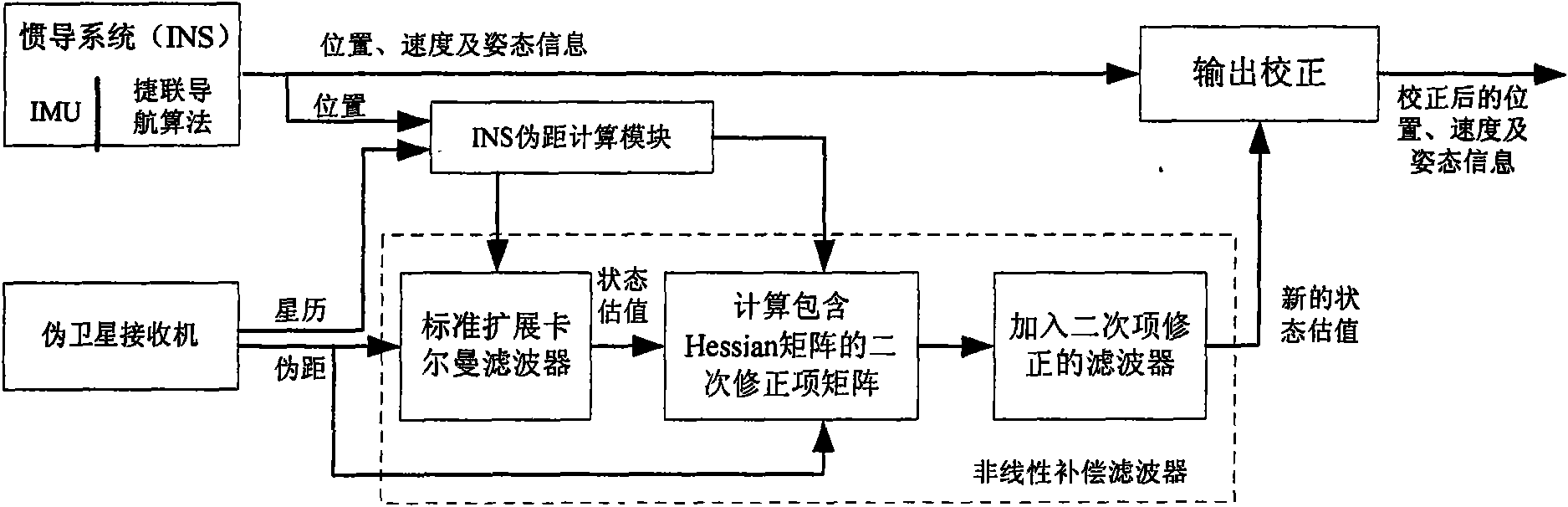
[0020] In the present invention, the measurement of the pseudo-range of the pseudolite is carried out by the quadratic Taylor expansion at the position given by the inertial navigation system, and the quadratic term is added to the measurement equation of the filter to correct it. The filter model error introduced linearly improves the performance of the pseudolite / inertial integrated navigation system.
[0021] Before describing the specific implementation of the present invention, it is necessary to introduce the Kalman filtering method. Kalman filtering is a linear, unbiased recursive minimum variance regression estimation, which uses the dynamic equation, the state equation, to describe the dynamic change law of the estimated quantity, and can optimally estimate the unknown state of the dynamic system from the noise data. Although engineering objects are generally continuous systems, in order to facilitate computer processing, continuous systems are generally discretized. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More