

Automatic ball-picking robot
A technology of robot and main processor, applied in manipulators, program-controlled manipulators, motion accessories, etc., can solve the problems of low ball picking efficiency and low intelligence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
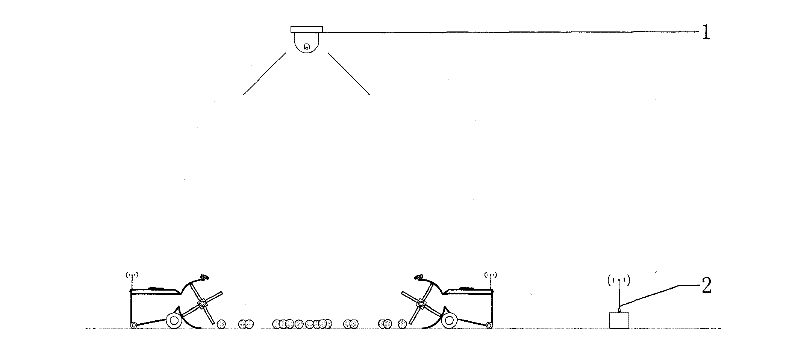
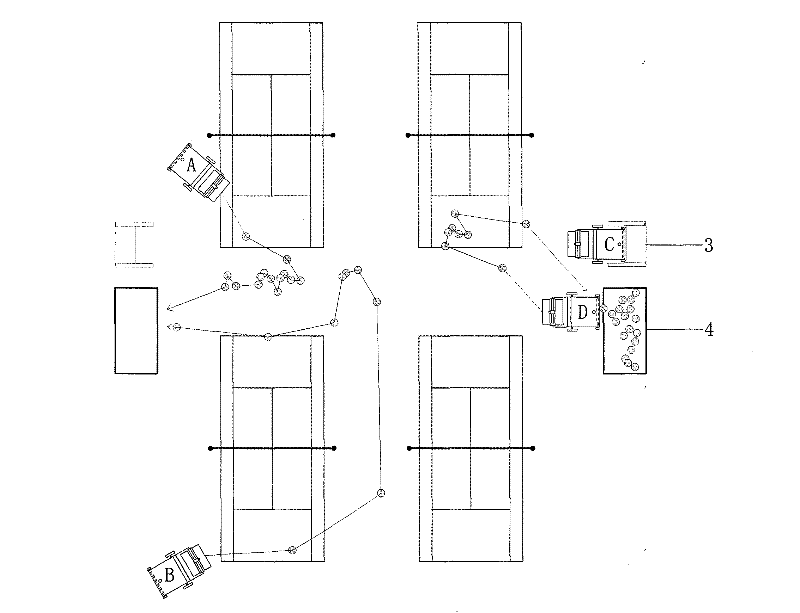
[0052] The working effect diagram of the autonomous ball-picking robot proposed by the present invention is as follows: figure 1 , figure 2 As shown, the working place of the autonomous ball-picking robot shown in the figure is a tennis court, but the operating environment of the autonomous ball-picking robot proposed by the present invention is not limited to the tennis court. Such as figure 1 As shown, the robot is picking up the ball, the global vision sensor 1 is set up above the field, and the main processor and the wireless communication module A 2 are placed beside the field. Such as figure 2 Shown, the charging device 3 of the autonomous ball-picking robot that the present invention proposes, and the place 4 of pouring the ball is all placed on the side of the field. figure 2 The four mobile basic carriers A, B, C, and D shown in the figure are working in the multi-machine cooperation mode. The mobile basic carriers A and B are in the state of picking up balls. T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More