

Respiratory movement predicting method
A technology of respiratory movement and prediction method, which is applied in diagnostic recording/measurement, medical science, sensors, etc., and can solve problems such as large calculation errors, difficulty in selecting the optimal number of historical states, and inability to effectively approach the target
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The present invention will be further described below in conjunction with accompanying drawing.
[0051] The steps to implement prediction-based image-guided tracking are as follows:
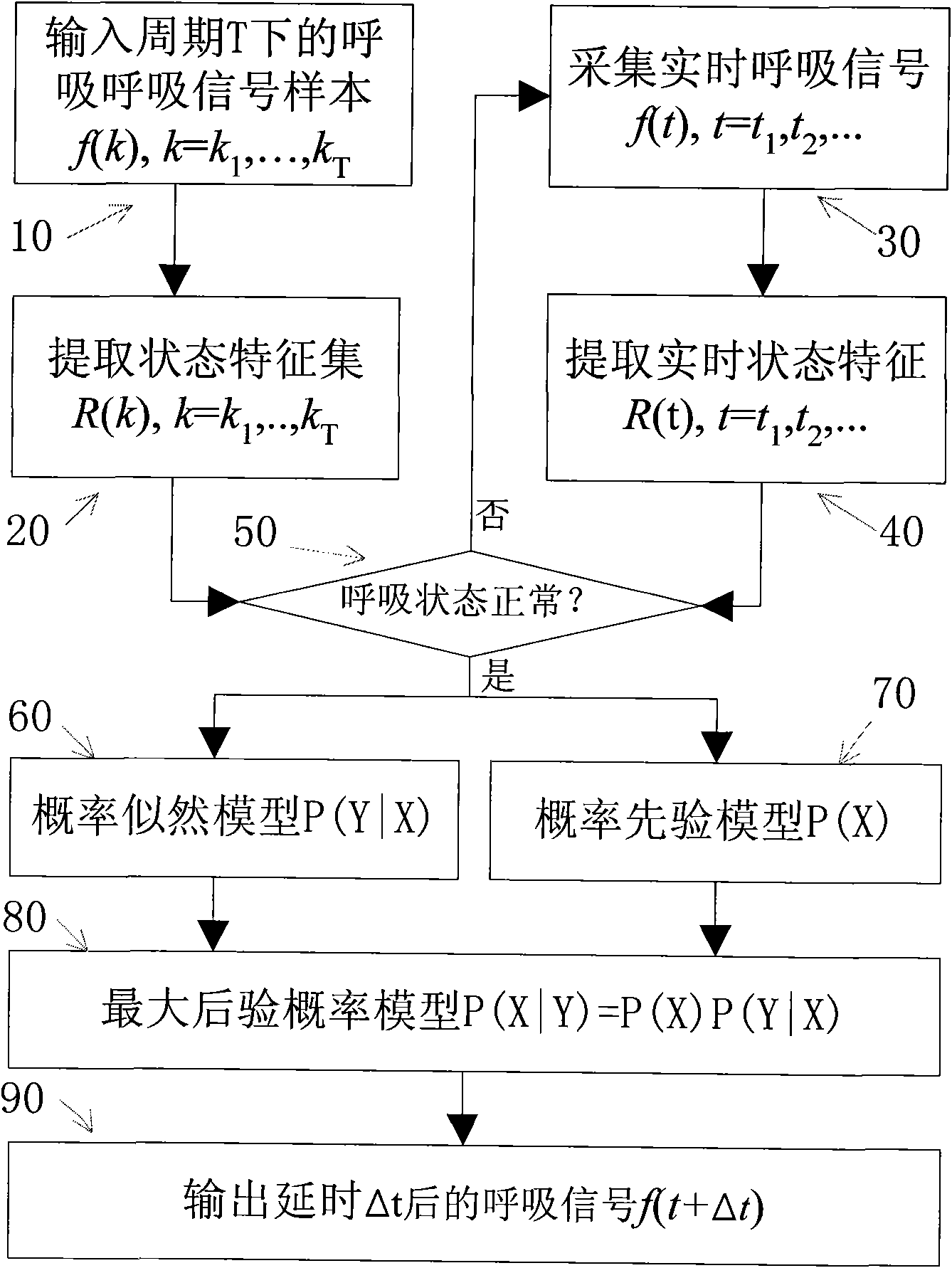
[0052] 1. If figure 1 10 in: the respiratory signal sample f(k) under the input period T, k=k 1 , k 2 ,...k T, before treatment, under a standard breathing cycle T: obtain the breathing signal samples f(k) in one breathing cycle. And the signal is denoised. Generally, the normal breathing process of an individual subject is accompanied by signal noise, and the average period of the noise signal is Q w , using the Gaussian operator G σ ( x ) = ( 2 π σ ) - 1 e x 2 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More